Rail Vehicle Mechatronics
Maksym Spiryagin, Stefano Bruni, Christopher Bosomworth, Peter Wolfs, Colin Cole
- 440 pagine
- English
- ePUB (disponibile sull'app)
- Disponibile su iOS e Android
Rail Vehicle Mechatronics
Maksym Spiryagin, Stefano Bruni, Christopher Bosomworth, Peter Wolfs, Colin Cole
Informazioni sul libro
This unique and up-to-date work surveys the use of mechatronics in rail vehicles, notably traction, braking, communications, data sharing, and control. The results include improved safety, comfort, and fuel efficiency.
Mechatronic systems are a key element in modern rail vehicle design and operation. Starting with an overview of mechatronic theory, the book covers such topics as modeling of mechanical and electrical systems for rail vehicles, open and closed loop control systems, sensors, actuators, and microprocessors. Modern simulation techniques and examples are included throughout the book. Numerical experiments and developed models for railway application are presented and explained. Case studies are used, alongside practical examples, to ensure that the reader can apply mechatronic theory to real world conditions. These case studies include modeling of a hybrid locomotive and simplified models of railway vehicle lateral dynamics for suspension control studies.
Rail Vehicle Mechatronics provides current and in-depth content for design engineers, operations managers, systems engineers, and technical consultants working with freight, passenger, and urban transit railway systems worldwide.
Domande frequenti
Informazioni
1Introduction to Rail Vehicle Mechatronics
1.1HISTORICAL REVIEW
- Phase 1: Automation of direct processes. This phase is dated to the end of the 18th century. In some cases, it can also be the time when students of some colleges started to study the discipline referred to as “electromechanics.”
- Phase 2: Analogue automation. This phase started by the late 1920s and continued to be developed into the late 1940s.
- Phase 3: Digital automation. Immediately after the first transistor was invented in 1947, the engineering world was focused on electronics and its application in a variety of industry fields.
- Phase 4: Digital automation control. By the late 1960s, the Japanese engineer Tetsuro Mori from Yaskawa Electric Corporation was working on electronic controls for electric motors and at that time he introduced the term mechatronics which only covered a combination of mechanics and electronics. The major difference between earlier electromechanics and mechatronics as disciplines was that mechatronics provided much more flexibility in terms of system design and its operation.
- Phase 5: Digital mechatronic control. This phase was introduced in the 1970s and it was still considered the digital automation control phase in most publications. However, the first 4-bit and 8-bit microprocessor chips introduced in 1971 and 1972, respectively, allowed moving away from the usage of mechanical mechanisms and devices and provided easy ways to program different tasks for mechatronic systems. The outcome of this was that mechatronic systems became more precise and faster in exercising control than their predecessors and, in addition, this made possible to introduce automatic data collection and reporting features in the design of mechatronic systems. At this stage, the transition of automatic and control engineering [1] to mechatronics can be observed.
- Phase 6: The microprocessor mechatronic control. In the 1990s, mechatronics started to be more flexible by means of the usage of computerized systems that also included communication and networked technologies. This allowed mechatronics as a discipline to cover some additional knowledge areas such as information technologies, sensors, and actuators.
During the 1990s, in other industries such as the aircraft and automotive industries, the power that became available from designing the mechanical system in conjunction with the electronics, computing and control, i.e., the use of mechatronics, was realised in a variety of research and development programmes, Although the railway industry is, perhaps naturally, somewhat behind these other two industries, nevertheless a variety of developments are being considered currently which imply that a ‘mechatronic period’ is close to happening for railway vehicles.
- Traction power systems
- Wheel adhesion systems
- Tilting systems
- Active suspension systems
- Active steering systems
- Braking systems
- Safety protection systems that provide protection against derailment
- Automatic train control systems
- Condition monitoring and fault detection
- Rail vehicle testing and roadworthiness acceptance
1.2THEORETICAL ASPECTS FOR THE APPLICATION OF MECHATRONIC SYSTEM
1.2.1STABILITY AND CURVING
1.2.1.1Running Stability of a Railway Vehicle
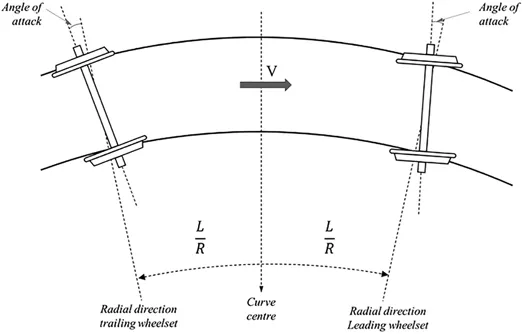
1.2.1.2Curving Behavior of a Railway Vehicle