This book introduces acoustic wave theories using a reader-friendly matrix-based linear algebra approach. It will enable the reader to take advantage of software tools such as MATLAB (commercial codes) and OCTAVE (open-source codes) to gain better and deeper understanding of the underlying physics quickly. In this aspect, this text can be regarded as a practical introduction of the acoustic wave theories in an easy-to-follow linear algebra format using matrix manipulations instead of an abstract approach relying on tensor manipulations. The book also uses case studies to demonstrate how the fundamentals on acoustic waves discussed throughout the book are applied in device designs and analyses such that the connections and interdependences between the underlying sciences and the observed behavior and performances can be better appreciated by the reader. To achieve this, all problems for illustrations, examples, case studies, and device analyses are developed and solved based on the mathematical foundations laid out in the book.
- 344 pages
- English
- ePUB (mobile friendly)
- Available on iOS & Android
eBook - ePub
About this book
Trusted by 375,005 students
Access to over 1.5 million titles for a fair monthly price.
Study more efficiently using our study tools.
Information
Chapter 1 Introduction
It is said that sound was recognized as traveling in waves as early as in the sixth century BC by the Greek philosopher Pythagoras (570-495 BC) but scientific understanding of sound waves came much later in the 16th and 17th centuries. In this chapter, we will conduct a brief overview of human’s search in understanding the sound waves, the various types of seismic and acoustic waves, and the development of wave theories, along with a modern day application of acoustic wave technologies.
1.1 Sound Waves and Acoustics
Italian physicist Galileo Galilei (1564-1642) was believed to be the first scientist to demonstrate the relationship between the frequency of a wave and the pitch it produces. French mathematician Marin Mersenne (1588-1648) conducted the first experiments in 1640 to determine the speed of sound traveling in air. Twenty years later, British scientist Robert Boyle (1627-1691) demonstrated that the transmission of sound waves required a medium such as air by using improved vacuum technology to show that sound intensity decreased virtually to zero as air was pumped out. English physicist Robert Hooke (1635-1703) first produced a sound wave of known frequency. Later, German physicist Ernst Chladni (1756-1827) made extensive analyses of sound-producing vibrations. In 1801 the French mathematician Joseph Fourier (1768-1830) discovered that the sound waves produced by a vibrating string were just a combination of a series of simple periodic waves in different frequencies. Although the attempt to measure the speed of sound started in the 17th century by Mersenne, the earliest precise experimental value for the speed of sound was obtained at the Academy of Sciences in Paris in 1738 with a value of 332 m/s, which is very close to the presently accepted value of 331.29 m/s at 0°C.
French physicist Joseph Sauveur (1653-1716) was believed to be the first scientist to use the term acoustics for the study of sound. Acoustics is also a term we use today to associate with string instruments and audible sounds in a frequency range from 20 Hz to 20 KHz. Waves with frequency higher than 20 KHz are typically referred to as ultrasound. In this book, however, acoustic waves are mechanical waves generated by the displacements of particles in a medium or a solid material having frequency typically in the ultrasound range.
Speaking of ultrasound, Italian physiologist and biologist Lazzaro Spallanzani (1729-1799) was credited for the discovery that bats navigate in the dark through the reflection of high frequency sounds (echolocation), laying the basis of ultrasound physics. While bats use their biological capability to generate and detect ultrasound, an engineering means to produce ultrasound was made possible only with the discovery of direct and reverse piezoelectric effects by the French physicists and brothers, Pierre Curie (1859-1906) and Jacques Curie (1855-1941) in 1880. Their discovery of piezoelectric effects provided a primary means for generating and receiving acoustic waves. The actual realization of ultrasonic technologies, however, was not possible until the development of the electronic oscillator and amplifier to drive the piezoelectric element in the early 20th century. The tragic sinking of the Titanic in 1912 played a role in accelerating scientific efforts to develop a system to visualize underwater structures and the First World War also provided another impetus to speed up the development of high-frequency sound wave technologies to detect submarines. One such successful outcome was the development of SONAR (Sound Navigation and Ranging) by the U.S. Navy in the 1930s.
1.2 Main Types of Acoustic Waves
One commonly known type of acoustic waves is seismic tremors generated from an earthquake event. From the standpoint of spatial concentration of vibrational energy, these waves can be grouped into body (or bulk) waves and surface waves. Apparently, by their definitions, body or bulk waves are waves that propagate through the interior of a medium, and surface waves are those traveling along the surface of the medium. Music that propagates in air is an examples of bulk waves, and ripples traveling along the surface of a body of water are of surface waves.
There are two types of bulk waves, namely, longitudinal waves and transverse waves. Longitudinal waves (or L waves, for short) are often called compressional, dilatation or irrotational waves. In seismological terms, they are primary waves, or P waves for short. Particles vibration caused by a longitudinal wave occurs in the same direction in which the wave travels. Sound waves are examples of longitudinal waves. By contrast, transverse waves (often termed T waves for short) are shear, rotational or equivoluminal waves. In seismology, they are known as secondary waves, or S waves. Particle vibration caused by transverse waves occurs in a direction perpendicular to the direction in which the wave travels.
In other words, longitudinal waves are waves that polarize and propagate in the same direction and transverse waves are those that polarize in a direction perpendicular to the direction of wave propagation. In reference to a three-dimensional (3D) Cartesian Coordinates system, we can imagine that along each of the three coordinates directions, three waves could possibly exist. For example, when acoustic waves propagate in the X direction, there could be a longitudinal wave (L wave) polarizing in the X direction, and two transverse waves, one polarizing in the Y direction (the YX-transverse wave) and the other in the Z direction (the ZX-transverse wave). The same can be said to waves propagating along the Y direction, the Z direction, or any arbitrary direction.
When the medium is bounded by a free surface, the surface can serves as a guiding boundary for acoustic waves to travel along. For this reason, surface waves are often considered as guided waves. There are a few different types of surface waves, among them, Rayleigh waves, Love waves, Lamb waves and Bleustein-Gulyaev wave. Rayleigh waves, discovered by Lord Rayleigh (1842-1919), are surface acoustic waves consisting of a transverse wave component vibrating in the direction normal to the surface and a longitudinal wave component vibrating in the direction in which the waves travel. So Rayleigh waves are elliptically polarized surface waves. Love waves, discovered by Augustus Edward Hough Love (1863-1940), are transverse waves traveling in a thin surface layer bonded to a thick support material of different properties with particle vibration occurring in a direction that is parallel to the surface but perpendicular to the direction in which the waves propagate. Lamb waves, discovered by Horace Lamb (1849-1934), are waves traveling along both the upper and lower surfaces of a plate structure. The connection between Rayleigh waves and Lamb waves is that in the former the medium is bounded by one free surface as the guiding boundary and in the latter the medium is bounded by two free surfaces on both the upper and lower sides to serve as the guiding boundaries. Bleustein-Gulyaev wave is a horizontal shear wave formed due to piezoelectric coupling. We will discuss all these waves in later chapters.
1.3 A Brief History of Wave Theory Development
In 1831 Simeon Denis Poisson (1781-1840) showed that a homogeneous isotropic elastic solid body of unlimited extent can transmit two kinds of waves with different velocities. Of the two waves, the quicker wave is the longitudinal wave and the slower one the transverse wave. In 1849, Sir George Stokes (1819-1903) published his proof that the quicker wave, traveling at the velocity of is a wave consisting of particles polarizing and vibrating in an irrotational dilation manner, and the slower wave, traveling at the velocity of is a wave of equivoluminal distortion, where λL and μL are elastic constants (known today as the Lamé constants) of the medium, and ρ its density. The theory of the dilatational and distortional waves does not consider the existence of a boundary, which posed some difficulties when it was used to explain the seismic movements because all observations and recordings of seismic tremors were made at the surface of the earth.
In 1887 Lord Rayleigh showed that an irrotational dilation displacement (the longitudinal wave) and an equivoluminal rotation displacement (the transverse wave) can occur in a coupled form near a surface free from traction and that neither of two waves penetrates far beneath the surface. Such coupled acoustic waves that travel along a surface have since been called Rayleigh waves.
The year 1889 marked the beginning of systematic recording of the disturbances caused by earthquakes. Early records showed two distinct stages, namely, a preliminary tremor followed by a main shock. At the time, the two events were regarded as dilational and distortional waves emerging at the earth surface. In 1900, Richard Dixon Oldham (1858-1936) applied the concept of Rayleigh waves to explain the seismic records. He hypothesized that the first and second phases of the preliminary tremors were the results of dilational and distortional waves, respectively, and the main shock was the result of Rayleigh waves. The suggestion that the main shock was the result of Rayleigh waves was not well received because observation had shown that a large part of the motion transmitted in the main shock was a horizontal movement perpendicular to the direction of wave propagation.
In Lord Rayleigh’s investigation, the waves were regarded as having already arrived from a distant source traveling along the surface. In 1903 and 1904, Lamb published his theory on surface wave propagation by considering an arbitrary disturbance such as impulsive pressure suddenly applied at a point of the surface of a homogeneous semi-infinite body. Lamb’s theory helped explain conveniently some of the most prominent features of seismic records including the first and second phases of the preliminary tremors and the large disturbance of the main shock, and even the gradual decay of the movement, but it cannot account for the presence of horizontal transverse movement.
In a long essay published in 1911 in honoring his receiving the Adams’ Prize of 1910, Love summarized many of his notable works, among them the theory of the propagation of seismic waves. In this work, Love showed that a different type of surface waves could exist in a horizontal plane with particle polarization occurring in a direction perpendicular to the direction in which the waves travel. This finding provided the missing linking in the understanding of the seismic records, particularly the existence of the horizontal movement perpendicular to the direction of wave propagation. Such transverse surface waves that travel along a surface with particle polarization occurring in a horizontal plane have since been called Love waves.
1.4 Uniqueness of Acoustic Wave Devices
In this book, we will focus our discussions on acoustic wave propagation in solid piezoelectric materials such as lithium niobate (LiNbO3), lithium tantalate (LiTaO3), zinc oxide (ZnO), cadmium sulphate (CdS), gallium arsenide (GaAs), langasite (LGS) and quartz (SiO2), etc. For piezoelectric materials, as the Curie brothers demonstrated in 1880, when a mechanical strain is applied, atoms inside the material will be displaced from their original locations, resulting in polarization of dipoles and generation of an electric field. This effect is commonly known as the direct piezoelectric effect. Conversely, when a piezoelectric material becomes strained when placed in an electric field, it is known as the reverse piezoelectric effect. Since the discovery of the piezoelectric effect in 1880 the science of piezoelectricity has gradually been moved from research laboratories to real world applications. The sonar devices developed during and after World War I are first examples of its practical use. To date, piezoelectric devices are ubiquitous, including for the production and detection of sound (or ultrasound), mechanical actuation and excitation, electronics and communications, signal processing, various sensors (e.g., thickness and temperature), and even biosensors, among others.
Bulk acoustic wave or waves (BAW or BAWs) typically travel in solids with a phase velocity in a range on the scale of 103 − 104 m/s, which is significantly slower than electromagnetic waves. Take an average velocity of 3 × 103 m/s for an acoustic wave, and 3 × 108 m/s for an electromagnetic wave traveling at the speed of light, as an example, by the commonly known relationship between velocity (v), frequency (f) and wavelength (λ): λ = v/f it is seen that realizing a predetermined operational frequency (e.g., 100 MHz) would require a wavelength of 3 m for the electromagnetic wave, but only 3 × 10-5 m, or 30 am, for the acoustic wave, which is 105 times shorter than the former. This means that acoustic devices operating at a desirable frequency can be made on a very small piece of piezoelectric material. Surface acoustic wave or waves (SAW or SAWs) typically travels with a phase velocity that is less than that of the slowest bulk acoustic wave. However, the Love type of surface acoustic waves, particularly those traveling in a thin layer bounded to a thicker substrate, typically travels with a phase velocity that is faster than that of the transverse horizontal waves in the layer but slower than that in the substrate.
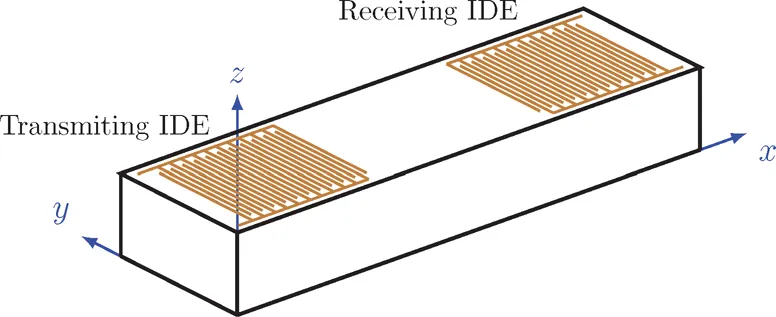
The various techniques created in the 1950s and 1960s for the generation and detection of both BAWs and SAWs have helped accelerate the use of acoustic devices in many applications. In the case of BAWs, quartz resonators were developed with high Q-values as a result of the low acoustic losses. For SAWs, the introduction of planar interdigitated electrodes (IDE) as transducers in the 1960s marked the beginning of its wide-spread applications. Figure 1.1 shows a typical two-port delay-line transversal SAW filter or sensor device with an equal number of finger pairs in both the transmitting and receiving IDEs. In this device, two IDE transducers are placed on the surface of a rectangle-shaped piezoelectric substrate, one to generate acoustic waves as a transmitter and the other to detect the waves as a receiver. The transmitting IDE at the left end of the device converts an input signal into mechanical strains, which in turn generate acoustic waves. The generated acoustic waves will travel along the surface of the piezoelectric material toward the receiving IDE and get converted back to electrical output signal via a reverse piezoelectric effect by the receiving IDE.
In a SAW filter application, the ...
Table of contents
- Cover Page
- Half-Title Page
- Title Page
- Copyright Page
- Dedication
- Table of Contents
- Preface
- 1 Introduction
- 2 Elasticity and Piezoelectricity
- 3 Coordinate Rotation and Matrix Transformation
- 4 Classes of Crystal Symmetry
- 5 Bulk Acoustic Waves
- 6 Surface Acoustic Waves
- 7 Temperature Effect
- 8 Acoustic Waves in Thin Layers
- 9 Applications and Devices
- Appendix
- References and Further Reading
- Index
Frequently asked questions
Yes, you can cancel anytime from the Subscription tab in your account settings on the Perlego website. Your subscription will stay active until the end of your current billing period. Learn how to cancel your subscription
No, books cannot be downloaded as external files, such as PDFs, for use outside of Perlego. However, you can download books within the Perlego app for offline reading on mobile or tablet. Learn how to download books offline
Perlego offers two plans: Essential and Complete
- Essential is ideal for learners and professionals who enjoy exploring a wide range of subjects. Access the Essential Library with 800,000+ trusted titles and best-sellers across business, personal growth, and the humanities. Includes unlimited reading time and Standard Read Aloud voice.
- Complete: Perfect for advanced learners and researchers needing full, unrestricted access. Unlock 1.5M+ books across hundreds of subjects, including academic and specialized titles. The Complete Plan also includes advanced features like Premium Read Aloud and Research Assistant.
We are an online textbook subscription service, where you can get access to an entire online library for less than the price of a single book per month. With over 1.5 million books across 990+ topics, we’ve got you covered! Learn about our mission
Look out for the read-aloud symbol on your next book to see if you can listen to it. The read-aloud tool reads text aloud for you, highlighting the text as it is being read. You can pause it, speed it up and slow it down. Learn more about Read Aloud
Yes! You can use the Perlego app on both iOS and Android devices to read anytime, anywhere — even offline. Perfect for commutes or when you’re on the go.
Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app
Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app
Yes, you can access Bulk and Surface Acoustic Waves by Guigen Zhang in PDF and/or ePUB format, as well as other popular books in Mathematics & Applied Mathematics. We have over 1.5 million books available in our catalogue for you to explore.