Después de la publicación de Guía de Iconos de Catia V5, el mismo autor ha escrito un nuevo libro que abarca el que es posiblemente el módulo más atractivo de Catia: Módulo de Cinemática de Catia V5. El libro tiene el propósito de ser un recurso más para los proyectistas y usuarios de Catia V5 que ya conocen el programa y tienen un nivel básico de inicio. Con el libro podrán disponer de un recurso que les permita acceder de forma rápida e intuitiva al conocimiento del funcionamiento de las herramientas que nos brinda Catia, y poder simular así movimientos de nuestros diseños. En el libro encontrarán de forma esquemática, simple y clara una explicación de todas y cada una de las órdenes del módulo de simulación de CATIAV5.(DMU). Para ello se ha divido cada capítulo en 4 espacios: -Utilidad: este apartado nos mostrará los usos de la herramienta. -Acceso: podremos ver las distintas formas de hacer efectiva la orden. -Procedimiento: es el apartado más extenso en el cual constan todos los pasos a seguir detallados en las capturas de pantalla. -Notas: por último, se ha añadido un apartado donde el autor ha incluido algunos conceptos a tener en cuenta a la hora de utilizar dicha orden. Aquí igualmente el lector podrá escribir sus propios conceptos a tener en cuenta, ampliando así el conocimiento descrito en el libro para posteriores consultas. Este manual se ha realizado en base a la versión de CATIA V5 Release 21, aun así, las posteriores Release del programa publicadas por Dassault Systems no deberían afectar el contenido de este manual. Xavier G. Freixer es un Delineante Proyectista con más de 20 años de experiencia con programas de CAD, y unos 15 con CATIA. Laboralmente ha participado con éxito en distintos proyectos mecánicos destinados a la automatización de procesos industriales, así como en la implicación en proyectos de reducción de costes en el proceso de diseño y fabricación mediante herramientas como CATIA.
Cuenta con la confianza de 375,005 estudiantes
Acceso a más de 1,5 millones de títulos por un precio mensual justo.
Estudia de forma más eficiente usando nuestras herramientas de estudio.
El módulo de DMU Kinematics se utiliza para simular movimientos de mecanismos en CATIA. De este modo, podremos ver sus movimientos así como analizar los resultados. Para ello tenemos una serie de herramientas que nos ayudarán a llevar a cabo nuestras ideas o diseños en 3D.
Para su utilización es necesario disponer de la licencia KIN-DMU KINEMATICS SIMULATOR, así como de
los módulos básicos de diseño de CATIA (MD2). De este modo, podremos tener un control total del diseño, modificar las piezas y mejorar nuestros mecanismos.
Para iniciar el módulo lo haremos a través de su icono que encontraremos en el menú superior: Start > Digital Makup > KMU Kineatics. O bien, configuraremos nuestro Start Menu y añadiremos dicha herramienta:
Antes de empezar debemos conocer algunos conceptos clave que hay que tener presente durante su uso.
Para empezar, cuando creamos operaciones de cinemática, también crearemos las constraints entre las piezas así como las operaciones en el mecanismo. Así pues, y para evitar contradicciones, en las constraints creadas y las que iremos creando, debemos eliminar todas las constraints que tengamos en el árbol si estamos seguros de que no las vamos a utilizar. Para ello, utilizaremos la herramienta Assembly Constraints Conversion que veremos más adelante en la página 37.
De forma esquemática deberemos seguir 4 pasos para crear nuestra simulación y posterior análisis.
Abrir un documento ensamblado (CATProduct)
Eliminar todos los constraints y crear los Joints de forma manual o convertir los constraints en Joints con la herramienta adecuada.
Crear la simulación
Analizar los resultados y modificar si fuera necesario el diseño.
Como muchas herramientas de CATIA, todas las operaciones que vayamos realizando con este módulo irán quedando reflejadas en el árbol del Producto.
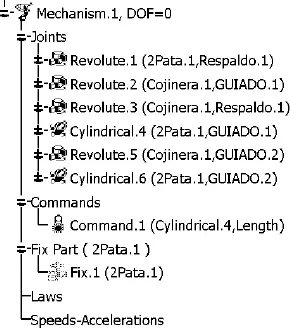
La estructura del árbol quedará de la siguiente forma agrupada en el subárbol de Applications:
Mechanisms: Mecanismos creados con elementos del Product.
[Nombre del elemento simulado], DOF (Degree of Freedom, Grados de libertad)= 0 (este valor debe ser «0» para poder realizar las simulaciones.)
Joints: son las operaciones de este mecanismo.
Commands: limitaciones numéricas de las operaciones.
FixParts: elementos fijos. Solo podremos tener uno por mecanismo.
Laws: (Leyes) Sitio donde se irán añadiendo las leyes del mecanismo.
Speeds-Accelerations: Aquí veremos reflejados los posibles parámetros de aceleración y velocidades de los mecanismos.
Simulation: definiremos los movimientos que puede hacer cada mecanismo.
Sequences: con la ayuda de las simulaciones que hemos creado anteriormente podremos definir el orden que estas deben seguir así como si estas se entrelazan entre sí.
Simulation with Comands
Utilidad
Este icono nos permitirá tener control sobre los m...
Índice
Cubrir
Título de la página
Derechos de Autor
Contenido
Introducción
Trabajando con DMU Kinematics
Preguntas frecuentes
Sí, puedes cancelar tu suscripción en cualquier momento desde la pestaña Suscripción en los ajustes de tu cuenta en el sitio web de Perlego. La suscripción seguirá activa hasta que finalice el periodo de facturación actual. Descubre cómo cancelar tu suscripción
No, los libros no se pueden descargar como archivos externos, como los PDF, para usarlos fuera de Perlego. Sin embargo, puedes descargarlos en la aplicación de Perlego para leerlos sin conexión en el móvil o en una tableta. Descubre cómo descargar libros para leer sin conexión
Perlego ofrece dos planes: Esencial y Avanzado
El plan Esencial es ideal para estudiantes y profesionales que disfrutan explorando una amplia gama de categorías. Accede a la Biblioteca Esencial con más de 800.000 títulos confiables y superventas en negocios, crecimiento personal y humanidades. Incluye tiempo de lectura ilimitado y voz estándar de Lectura en voz alta.
Avanzado: perfecto para estudiantes avanzados e investigadores que necesitan acceso total y sin restricciones. Desbloquea más de 1,5 millones de libros en cientos de categorías, incluyendo títulos académicos y especializados. El plan Avanzado también incluye características avanzadas como Lectura en voz alta Premium y Asistente de investigación.
Ambos planes están disponibles con ciclos de facturación mensual, semestral o anual.
Somos un servicio de suscripción de libros de texto en línea, donde puedes acceder a toda una biblioteca digital por menos del precio de un solo libro al mes. Con más de 1,5 millones de libros en más de 990 categorías, ¡te tenemos cubierto! Conoce nuestra misión
Busca el símbolo de lectura en voz alta en tu próximo libro para ver si puedes escucharlo. La herramienta de lectura en voz alta lee el texto en voz alta por ti, resaltando el texto a medida que se lee. Puedes pausarla, acelerarla y ralentizarla. Obtén más información sobre la lectura en voz alta
¡Sí! Puedes usar la aplicación de Perlego en dispositivos iOS y Android para leer cuando y donde quieras, incluso sin conexión. Es ideal para cuando vas de un lado a otro o quieres acceder al contenido sobre la marcha. Ten en cuenta que no será compatible con los dispositivos que se ejecuten en iOS 13 y Android 7 o en versiones anteriores. Obtén más información sobre cómo usar la aplicación
Sí, puedes acceder a Módulo de cinemática DMU de Catia V5 de Xavier González Freixer en formato PDF o ePub, así como a otros libros populares en Ciencia de la computación y CAD/CAM. Tenemos más de 1,5 millones de libros disponibles en nuestro catálogo para que explores.