![]()
CHAPTER 1
Theoretical and Experimental Design of Self-propelled Objects Based on Nonlinearity
S. Nakata*a and M. Nagayama,b
a Hiroshima University, Graduate School of Science, 1-3-1 Kagamiyama, Higashi-Hiroshima 739-8526, Japan;
b Hokkaido University, Research Institute for Electronic Science, Research Center of Mathematics for Social Creativity, N12W7, Kita-ward, Sapporo 060-0812, Japan
*Email:
[email protected] 1.1 Introduction
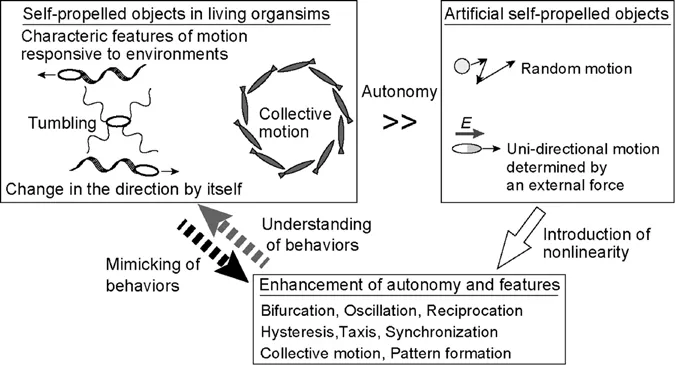
In this chapter, we explain the coupling of two phenomena, i.e. self-propelled motion and nonlinear phenomena. Several types of self-propelled objects have been observed to move a material or themselves in a small space, like bacteria, having the function of taxis.1,2 However, most self-propelled objects exhibit random or unidirectional motion without an external force, or the direction of the motion is controlled by an external force (e.g. electromagnetic force or light irradiation).3,4 This means that the autonomy of self-propelled objects is clearly lower than that of bacteria, because bacteria can characteristically change their behaviour according to internal and external conditions. However, oscillation, synchronization, pattern formation and bifurcation are typical nonlinear phenomena that are often observed in living organisms and nature.5–7 Previous experimental and numerical studies aiming to clarify the mechanisms of nonlinear phenomena suggest novel insights into their design and control. Thus, if one can introduce nonlinearity into self-propelled objects, their autonomy is enhanced, i.e. they can exhibit characteristic motions, such as oscillatory and synchronized motion, while sensing the environment.8,9
In this chapter, we explain how novel self-propelled systems, like bacterial motion, can be designed using simple experimental systems considering nonlinear science and chemical information (e.g. chemical structure and reaction–diffusion dynamics), as shown in Figure 1.1.
Figure 1.1 Schematic illustration of the comparison between animate and inanimate self-propelled objects and the strategy of introducing nonlinearity into inanimate self-propelled objects.
1.2 Camphor Boat Driven by the Difference in Surface Tension
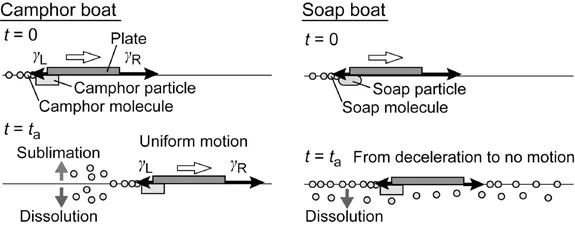
In this section, we introduce a camphor boat in which the driving force is the difference in surface tension as a simple self-propelled object, as illustrated in Figure 1.2.8–11 The camphor boat is prepared by gluing a camphor particle to a plastic plate. If only the plastic plate is floated on water, it doesn’t move because the surface tension is balanced around the plate. If the camphor boat is floated on water, it can move in the direction of the boat edge further away from the camphor particle (see the movement of the camphor boat on the left side of Figure 1.2). As camphor molecules are released onto the water surface, the surface tension around the camphor-containing end of the plastic plate is reduced (∼55 mN m−1).8–11 Thus, the camphor boat moves from the edge of the plastic plate with the lower surface tension towards that with a higher surface tension. The released camphor molecules are sublimated or dissolved in the water. Therefore, the difference in surface tension around the camphor boat is maintained. Hence, uniform motion of the camphor boat can continue for at least 30 minutes. If a soap particle is used instead of the camphor particle, a soap boat is created. The soap boat can only move for a reduced amount of time, because the released soap molecules remain on the water surface, lowering the surface tension around the whole boat. Therefore, the camphor boat is more convenient for experimentally studying the nature of self-propelled objects modelling inanimate systems. To induce a uniform motion of the soap particle, the soap molecules adsorbed at the interface should be dissolved in the bulk liquid phase. Uniform motion of soap particles is realized at an oil–water interface because soap molecules dissolve in the oil phase.12 Thus, purification of the interface by the desorption of the adsorbed soap molecules can maintain a uniform motion.
Figure 1.2 Schematic illustration of the comparison between a camphor and a soap boat.
1.2.1 Literature on the Research of Camphor Motion
According to our personal search, the oldest study on the subject of camphor motion was reported by Charles Tomlinson in 1862.13 Lord Rayleigh also reported on camphor motion in 1890.14 Charles V. Boys published a textbook titled ‘Soap Bubbles’ in 1920, containing demonstrations for younger generations at the Royal Institution Christmas lectures, including an introduction to camphor motion.15 There is a book about a self-propelled object on water called a ‘floating doll’, used as a toy...