![]()
Chapter 1
Fundamentals of GNSS
1.1 History of GNSS
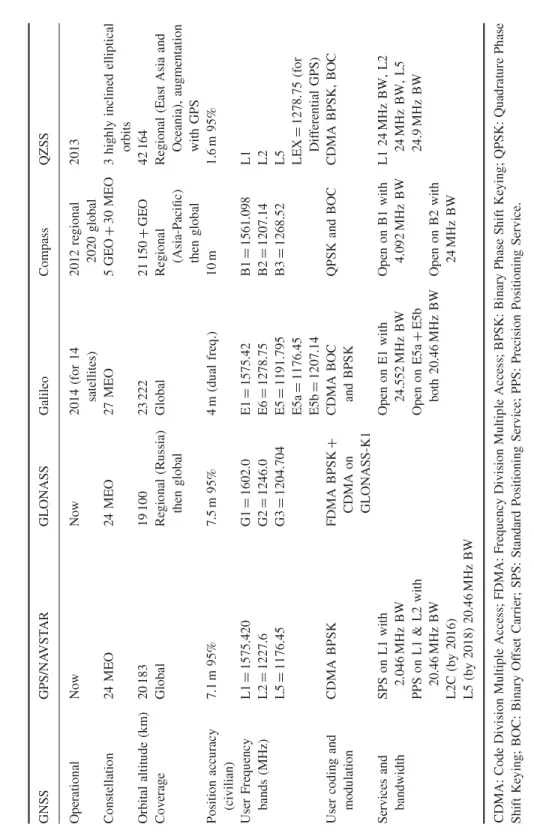
GNSS is a natural development of localised ground-based systems such as the DECCA Navigator and LORAN, early versions of which were used in the Second World War. The first satellite systems were developed by the US military in trial projects such as Transit, Timation and then NAVSTAR, these offering the basic technology that is used today. The first NAVSTAR was launched in 1989; the 24th satellite was launched in 1994 with full operational capability being declared in April 1995. NAVSTAR offered both a civilian and (improved accuracy) military service and this continues to this day. The system has been continually developed, with more satellites offering more frequencies and improved accuracy (see Section 1.3).
The Soviet Union began a similar development in 1976, with GLONASS (GLObal NAvigation Satellite System) achieving a fully operational constellation of 24 satellites by 1995 [1]. GLONASS orbits the Earth, in three orbital planes, at an altitude of 19 100 km, compared with 20 183 km for NAVSTAR. Following completion, GLONASS fell into disrepair with the collapse of the Soviet economy, but was revived in 2003, with Russia committed to restoring the system. In 2010 it achieved full coverage of the Russian territory with a 20-satellite constellation, aiming for global coverage in 2012.
The European Union and European Space Agency Galileo system consists of 26 satellites positioned in three circular medium Earth orbit (MEO) planes at 23 222 km altitude. This is a global system using dual frequencies, which aims to offer resolution down to 1 m and be fully operational by 2014. Currently (end 2010) budgetary issues mean that by 2014 only 18 satellites will be operational (60% capacity).
Compass is a project by China to develop an independent regional and global navigation system, by means of a constellation of 5 geostationary orbit (GEO) satellites and 30 MEO satellites at an altitude of 21 150 km. It is planned to offer services to customers in the Asia-Pacific region by 2012 and a global system by 2020.
QZSS (Quasi-Zenith Satellite System) is a Japanese regional proposal aimed at providing at least one satellite that can be observed at near zenith over Japan at any given time. The system uses three satellites in elliptical and inclined geostationary orbits (altitude 42 164 km), 120° apart and passing over the same ground track. It aims to work in combination with GPS and Galileo to improve services in city centres (so called urban canyons) as well as mountainous areas. Another aim is for a 1.6 m position accuracy for 95% availability, with full operational status expected by 2013.
It is likely that many of these systems will offer the user interoperability leading to improved position accuracy in the future. It has already been shown that a potential improvement in performance by combining the GPS and Galileo navigation systems comes from a better satellite constellation compared with each system alone [2]. This combined satellite constellation results in a lower dilution of precision value (see Section 1.3), which leads to a better position estimate. A summary of the various systems undertaken during the first quarter of 2011 is shown in Table 1.1.
Table 1.1 Summary of GNSS systems undertaken during Q1 2011
1.2 Basic Principles of GNSS
1.2.1 Time-Based Radio Navigation
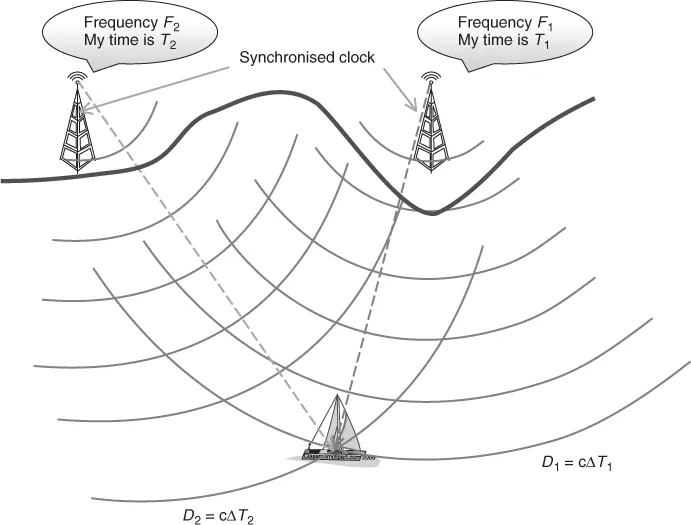
The principle of GNSSs is the accurate measurement of distance from the receiver of each of a number (minimum of four) of satellites that transmit accurately timed signals as well as other coded data giving the satellites' position. The distance between the user and the satellite is calculated by knowing the time of transmission of the signal from the satellite and the time of reception at the receiver, and the fact that the signal propagates at the speed of light. From this a 3D ranging system based on knowledge of the precise position of the satellites in space can be developed. To understand the principles, the simple offshore maritime 2D system shown in Figure 1.1 can be considered. Imagine that transmitter 1 is able to transmit continually a message that says ‘on the next pulse the time from transmitter 1 is …’, this time being sourced from a highly accurate (atomic) clock. At the mobile receiver (a ship in this example) this signal is received with a time delay ΔT1; the distance D1 from the transmitter can then be determined based on the signal propagating at the speed of light c, from D1 = cΔT1. The same process can be repeated for transmitter 2, yielding a distance D2. If the mobile user then has a chart showing the accurate location of the shore-based transmitter 1 and transmitter 2, the user can construct the arcs of constant distance D1 and D2 and hence find his or her location. For this system to be accurate all three clocks (at the two transmitters and on board the ship) must be synchronised. In practice it may not be that difficult to synchronise the two land-based transmitters but the level of synchronisation of the ship-based clock will fundamentally determine the level of position accuracy achievable. If the ship's clock is in error by ±1 µs then the position error will be ±300 m, since light travels 300 m in a microsecond. This is the fundamental problem with this simplistic system which can be effectively thought of as a problem of two equations with two unknowns (the unknowns being the ship's ux, uy location). However, in reality we have a third unknown, which is the ship's clock offset with respect to the synchronised land-based transmitters' clock. This can be overcome by adding a third transmitter to the system, providing the ability to add a third equation determining the ux, uy location of the ship and so giving a three-equation, three-unknown solvable system of equations. We will explore this in detail later when we consider the full 3D location problem that is GNSS. As a local coastal navigation system this is practical since all ships will be south of the transmitters shown in Figure 1.1.
At this point it is worth noting the advantages of this system, the key one being that the ship requires no active participation in the system; it is only required to listen to the transmissions to determine its position. Thus, there is no limit on the number of system users and, because they are receive only, they will be relatively low cost for the ship owner.
1.2.2 A 3D Time-Based Navigation System
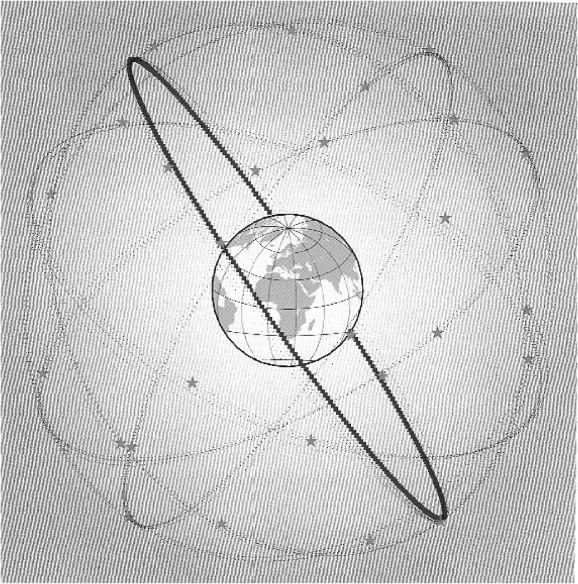
We can extend this basic concept of time-delay-based navigation to determine a user's position in three dimensions by moving our transmitters into space and forming a constellation surrounding the Earth's surface, Figure 1.2. In order for such a system to operate the user would be required to see (i.e. have a direct line of sight to) at least four satellites at any one time. This time four transmitters are required as there are now four unknowns in the four equations that determine the distance from a satellite to a user, these being the user's coordinates (ux, uy, uz) and the user's clock offset ΔT with respect to GPS time. The concept of GPS time is that all the clocks on board all the satellites are reading exactly the same time. In practice they use one (or more) atomic clocks, but by employing a series of ground-based monitoring stations each satellite clock can be checked and so any offset from GPS time can be transmitted to the satellite and passed on to the user requiring a position fix.
The (x, y, z) location of each satellite used in a position fix calculation must be accurately known, and although Kepler's laws of motion do a very good job in predicting the satellite's location, use of the above-mentioned monitoring stations can offer minor position corrections. These monitoring stations (whose accurate position is known) can be used to determine accurately the satellite's orbital location and thus send to each satellite its orbital position corrections, which are then reported to the users via the GPS transmitted signal to all users. So each satellite would effectively transmit ‘on the next pulse the time is …, my clock offset from GPS time is …, my orbital position correction is …’.
A sketch of a four-satellite position location is shown in Figur...