![]()
Chapter 1
The Physiology of 3D Perception
1.1 Binocular Viewing or Human Stereopsis
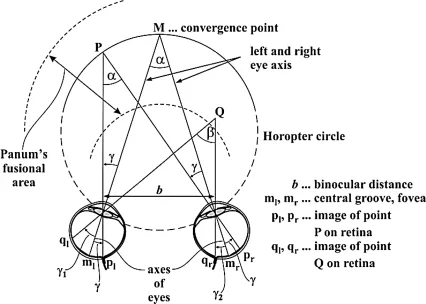
As one eye is capable only of perceiving a planar image, 3D viewing is commonly achieved by the cooperation of both eyes in providing each eye with a view of the object. The images that the eyes receive from the same object are different according to the different locations of the eyes. This binocular viewing provides the perception of depth, the third dimension, as further explained by the horopter circle in Figure 1.1. This circle serves as a reference from which the depth is determined [1, 2]. If the eyes are focusing, for which the synonyms fixating, accommodating, or converging are also used, on point M on the horopter circle, the ciliary muscles of the eyes rotate the eyeballs into such a position that the light from M passes the pupils parallel to the axes of the lenses in the eyes. The axes intersect at M. Then the light hits the retina in Figure 1.1 at the foveas ml for the left eye and mr for the right eye. The foveas are in the center of the retina and exhibit the highest density of light receptors. The rotation of the eyes is called the vergence. Obviously the axes of the eyes are no longer parallel, which will provide the depth information required by the brain [1, 3]. In this situation light from point P hits the retinas at the points pl for the left eye and pr for the right eye. The angles α at the periphery of the circle are, as is known from geometry, the same for all points P on the circle above the distance b between the pupils. As a consequence, also all the angles γ for points on the horopter circle are equal [4]. The angle γ at the retina, measured as a rule in arcmin, is called the disparity or the parallax. As all the points M and P on the horopter circle have the same disparity γ in both eyes, the difference d in the disparities of all points on this circle is zero. The further P is away from M, but still on the horopter circle, the larger is the disparity [2, 3]. Obviously the larger disparity is associated with a smaller depth. The disparity information is transferred to the brain, which translates it into a perceived depth. How the brain fuses the two disparities into a 3D image is not yet fully understood.
As all points on the horopter circle exhibit a zero difference in disparities, the circle serves as a reference for the depth. The fusion of the disparities and the depth perception as described works only in Panum's fusional area in Figure 1.1 [3]. In this area, reliable depth perception decreases monotonically with increasing magnitude of the disparity. This relationship is called the patent stereopsis. For a point Q in Figure 1.1 [3] not on the horopter circle but closer to the eyes and still in Panum's area, the disparities on the retina are given by the points ql for the left eye and qr for the right eye with the disparities γ1 and γ2. These points lie across the fovea on the other side of the retina and exhibit a so-called crossed disparity, while the points farther away than the horopter have an uncrossed disparity. Their image points corresponding to qr and ql for crossed disparities lie on the opposite side of the fovea.
For point Q the disparities γ1 and γ2 are no longer equal. The value γ1 − γ2 ≠ 0 together with the disparities themselves provide information to the brain on how much the depth of Q is different from the depth on the horopter. However, how the brain copes with this difference of disparities is again not fully known.
When moving an object from the horopter closer to the eye, the patent stereopsis is finally lost at a distance of around 2 m or less from the eyes. Fusion of the images may no longer work and double images, called diplopia, appear [3]. Due to overlarge disparities, the eyes perceive the object they are trying to accommodate and its background separately. The brain unsuccessfully tries to suppress the background information. On the other hand, the further away from the horopter the object is, the smaller is the disparity, because the axes of the lenses become closer to being parallel. Finally, at distances beyond about 10 m the differences between the small disparities can no longer be resolved and the depth information is lost. This coincides with our inability to estimate the difference in depth of objects that are too far away.
The average distance b of the pupils in Figure 1.1 of adults in the USA is 6.5 cm, and for 90% of these adults it lies between 6 and 7 cm [5]. The total range of disparity is about 80 arcmin for the perception of spatial frequencies from 2 to 20 cycles per degree and about 8 arcdegrees for low spatial frequencies around 0.1 cycles per degree [3]. This means that for low spatial frequencies larger disparities are available than for larger spatial frequencies. As a consequence, the sensitivity of disparities for low spatial frequencies is larger than for larger spatial frequencies. The same facts apply also for lower and larger temporal frequencies of the luminance in an image.
The smallest still recognizable disparity, the stereoacuity Dmin, is 20 arcsec in the spatial frequency range of about 2–20 cycles per degree, while the maximum perceivable disparity Dmax is 40 arcmin for low spatial frequencies [3]. As the values for Dmin and Dmax apply to both the crossed and uncrossed disparities standing for different ranges of depths, the values can be added to a total of 80 arcmin for high and 8 arcdegrees for low spatial frequencies, as already given above [6, 7]. Again this is also true for temporal frequencies in dynamic images with a larger sensitivity of disparities for lower temporal frequencies and a lower sensitivity for larger temporal frequencies of luminance.
There are two visual pathways from the retina to the brain. The parvocellular-dominated dorsal–cortical path connects the central retina to the ventral–cortical areas in the visual cortex where spatial patterns and color are analyzed. The magno-cellular-dominated dorsal–cortical path leads from the central and peripheral retina to dorsal–cortical areas in the visual cortex, where optical flow information for heading control and biological motion are investigated. Further information on these paths can be found in [8–10].
The stereoanomalies are associated with defects in these paths of information where there are neurons sensitive to only crossed or uncrossed disparities. The perception of depth is thought to involve responses from both types of neurons. In stereoanomalous individuals, one type of these neurons fails to be sensitive to their information. Then the other type of neurons dominates the response to all disparity information. In the case where neurons are only sensitive to uncrossed disparities belonging to objects located further away than the horopter circle, the information from crossed disparities stemming from objects closer to the eye than the horopter is suppressed in favor of objects far away. The individual perceives the close-up information as far away information with a far away depth. When the neurons are only sensitive to crossed disparities, the individual perceives the far away information with a depth close to the eye [11, 12].
Individuals who are stereoblind, as a rule resulting from a disease called strabismus, are assumed to be entirely lacking in disparity-sensitive neurons.
Under degraded stimulus conditions such as brief stimulus exposure, stereoanomalies are found in 30% of the population [13]. In addition, 6–8% of the population are stereoblind. The relatively large percentage of people incapable of perceiving a 3D image would merit more attention.
Another physiological disturbance is binocular rivalry. In this case an individual views a stereo display with a very large disparity or with interocular misalignment or distortion such that no fusion of the two eyes' image takes place [7, 14]. One eye inhibits the visual activities of the other eye. One view may be visible, as the other ...