This book presents the most recent research results on modeling and control of robot manipulators.
Chapter 1 gives unified tools to derive direct and inverse geometric, kinematic and dynamic models of serial robots and addresses the issue of identification of the geometric and dynamic parameters of these models.
Chapter 2 describes the main features of serial robots, the different architectures and the methods used to obtain direct and inverse geometric, kinematic and dynamic models, paying special attention to singularity analysis.
Chapter 3 introduces global and local tools for performance analysis of serial robots.
Chapter 4 presents an original optimization technique for point-to-point trajectory generation accounting for robot dynamics.
Chapter 5 presents standard control techniques in the joint space and task space for free motion (PID, computed torque, adaptive dynamic control and variable structure control) and constrained motion (compliant force-position control).
In Chapter 6, the concept of vision-based control is developed and Chapter 7 is devoted to specific issue of robots with flexible links. Efficient recursive Newton-Euler algorithms for both inverse and direct modeling are presented, as well as control methods ensuring position setting and vibration damping.
Trusted by 375,005 students
Access to over 1.5 million titles for a fair monthly price.
The design and control of robots require certain mathematical models, such as:
– transformation models between the operational space (in which the position of the end-effector is defined) and the joint space (in which the configuration of the robot is defined). The following is distinguished:
- direct and inverse geometric models giving the location of the end-effector (or the tool) in terms of the joint coordinates of the mechanism and vice versa,
- direct and inverse kinematic models giving the velocity of the end-effector in terms of the joint velocities and vice versa,
– dynamic models giving the relations between the torques or forces of the actuators, and the positions, velocities and accelerations of the joints.
This chapter presents some methods to establish these models. It will also deal with identifying the parameters appearing in these models. We will limit the discussion to simple open structures. For complex structure robots, i.e. tree or closed structures, we refer the reader to [KHA 02].
Mathematical development is based on (4 × 4) homogenous transformation matrices. The homogenous matrix iTj representing the transformation from frame Ri to frame Rj is defined as:
[1.1]
where isj, inj and iaj of the orientation matrix iRj indicate the unit vectors along the axes xj, yj and zj of the frame Rj expressed in the frame Ri; and where iPj is the vector expressing the origin of the frame Rj in the frame Ri.
1.2. Geometric modeling
1.2.1. Geometric description
A systematic and automatic modeling of robots requires an appropriate method for the description of their morphology. Several methods and notations have been proposed [DEN 55], [SHE 71], [REN 75], [KHA 76], [BOR 79], [CRA 86]. The most widely used one is that of Denavit-Hartenberg [DEN 55]. However, this method, developed for simple open structures, presents ambiguities when it is applied to closed or tree-structured robots. Hence, we recommend the notation of Khalil and Kleinfinger which enables the unified description of complex and serial structures of articulated mechanical systems [KHA 86].
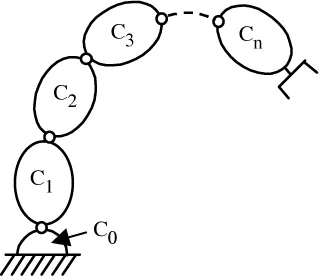
A simple open structure consists of n+1 links noted C0, …, Cn and of n joints. Link C0 indicates the robot base and link Cn, the link carrying the end-effector. Joint j connects link Cj to link Cj-1 (Figure 1.1). The method of description is based on the following rules and conventions:
– the links are assumed to be perfectly rigid. They are connected by revolute or prismatic joints considered as being ideal (no mechanical clearance, no elasticity);
– the frame Rj is fixed to link Cj;
– axis zj is along the axis of joint j;
– axis xj is along the common perpendicular with axes zj and zj+1. If axes zj and zj+1 are parallel or collinear, the choice of xj is not unique: considerations of symmetry or simplicity lead to a reasonable choice.
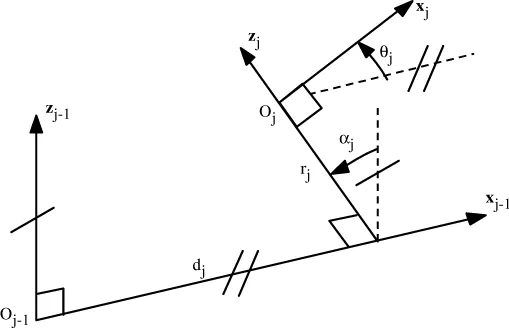
The transformation matrix from the frame Rj-1 to the frame Rj is expressed in terms of the following four geometric parameters:
– αj: angle between axes zj-1 and zj corresponding to a rotation about xj-1;
– dj: distance between zj-1 and zj along xj-1;
– θj: angle between axes xj-1 and xj corresponding to a rotation about zj;
– rj: distance between xj-1 and xj along zj.
Figure 1.1.A simple open structure robot
Figure 1.2.Geometric parameters in the case of a simple open structure
The joint coordinate qj associated to the jth joint is either θj or rj, depending on whether this joint is revolute o...
Table of contents
Cover
Title Page
Copyright
Chapter 1: Modeling and Identification of Serial Robots
Chapter 2: Modeling of Parallel Robots
Chapter 3: Performance Analysis of Robots
Chapter 4: Trajectory Generation
Chapter 5: Position and Force Control of a Robot in a Free or Constrained Space
Chapter 6: Visual Servoing
Chapter 7: Modeling and Control of Flexible Robots
List of Authors
Index
Frequently asked questions
Yes, you can cancel anytime from the Subscription tab in your account settings on the Perlego website. Your subscription will stay active until the end of your current billing period. Learn how to cancel your subscription
No, books cannot be downloaded as external files, such as PDFs, for use outside of Perlego. However, you can download books within the Perlego app for offline reading on mobile or tablet. Learn how to download books offline
Perlego offers two plans: Essential and Complete
Essential is ideal for learners and professionals who enjoy exploring a wide range of subjects. Access the Essential Library with 800,000+ trusted titles and best-sellers across business, personal growth, and the humanities. Includes unlimited reading time and Standard Read Aloud voice.
Complete: Perfect for advanced learners and researchers needing full, unrestricted access. Unlock 1.5M+ books across hundreds of subjects, including academic and specialized titles. The Complete Plan also includes advanced features like Premium Read Aloud and Research Assistant.
Both plans are available with monthly, semester, or annual billing cycles.
We are an online textbook subscription service, where you can get access to an entire online library for less than the price of a single book per month. With over 1.5 million books across 990+ topics, we’ve got you covered! Learn about our mission
Look out for the read-aloud symbol on your next book to see if you can listen to it. The read-aloud tool reads text aloud for you, highlighting the text as it is being read. You can pause it, speed it up and slow it down. Learn more about Read Aloud
Yes! You can use the Perlego app on both iOS and Android devices to read anytime, anywhere — even offline. Perfect for commutes or when you’re on the go. Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app
Yes, you can access Robot Manipulators by Etienne Dombre, Wisama Khalil, Etienne Dombre,Wisama Khalil in PDF and/or ePUB format, as well as other popular books in Technology & Engineering & Robotics. We have over 1.5 million books available in our catalogue for you to explore.