
eBook - ePub
Tomography
About this book
The principle of tomography is to explore the structure and composition of objects non-destructively along spatial and temporal dimensions, using penetrating radiation, such as X- and gamma-rays, or waves, such as electromagnetic and acoustic waves. Based on computer-assisted image reconstruction, tomography provides maps of parameters that characterize the emission of the employed radiation or waves, or their interaction with the examined objects, for one or several cross-sections. Thus, it gives access to the inner structure of inert objects and living organisms in their full complexity. In this book, multidisciplinary specialists explain the foundations and principles of tomographic imaging and describe a broad range of applications. The content is organized in five parts, which are dedicated to image reconstruction, microtomography, industrial tomography, morphological medical tomography and functional medical tomography.
Trusted by 375,005 students
Access to over 1.5 million titles for a fair monthly price.
Study more efficiently using our study tools.
Information
Chapter 1
Introduction to Tomography 1
1.1. Introduction
Tomographic imaging systems are designed to analyze the structure and composition of objects by examining them with waves or radiation and by calculating virtual cross-sections through them. They cover all imaging techniques that permit the mapping of one or more physical parameters across one or more planes. In this book, we are mainly interested in calculated, or computer-aided, tomography, in which the final image of the spatial distribution of a parameter is calculated from measurements of the radiation that is emitted, transmitted, or reflected by the object. In combination with the electronic measurement system, the processing of the collected information thus plays a crucial role in the production of the final image. Tomography complements the range of imaging instruments dedicated to observation, such as radar, sonar, lidar, echograph, and seismograph. Currently, these instruments are mostly used to detect or localize an object, for instance an airplane by its echo on a radar screen, or to measure heights and thicknesses, for instance of the earth’s surface or of a geological layer. They mainly rely on depth imaging techniques, which are described in another book in the French version of this series [GAL 02]. By contrast, tomographic systems calculate the value of the respective physical parameter at all vertices of the grid that serves the spatial encoding of the image. An important part of imaging systems such as cameras, camcorders, or microscopes is the sensor that directly delivers the observed image. In tomography, the sensor performs indirect measurements of the image by detecting the radiation with which the object is examined. These measurements are described by the radiation transport equations, which lead to what mathematicians call the direct problem, i.e. the measurement or signal equation. To obtain the final image, appropriate algorithms are applied to solve this equation and to reconstruct the virtual cross-sections. The reconstruction thus solves the inverse problem [OFT 99]. Tomography therefore yields the desired image only indirectly by calculation.
1.2. Observing contrasts
A broad range of physical phenomena may be exploited to examine objects. Electromagnetic waves, acoustic waves, or photonic radiation are used to carry the information to the sensor. The choice of the exploited physical phenomenon and of the associated imaging instrument depends on the desired contrast, which must assure a good discrimination between the different structures present in the objects. This differentiation is characterized by its specificity, i.e. by its ability to discriminate between inconsequential normal structures and abnormal structures, and by its sensitivity, i.e. its capacity for measuring the weakest possible intensity level of relevant abnormal structures. In medical imaging, for example, tumors are characterized by a metabolic hyperactivity, which leads to a marked increase in glucose consumption. A radioactive marker such as fluorodeoxyglucose (FDG) enables detection of this increase in the metabolism, but it is not absolutely specific, since other phenomena, such as inflammation, also entail a local increase in glucose consumption. Therefore, the physician must interpret the physical measurement in the context of the results of other clinical examinations.
It is preferable to use coherent radiation whenever possible, which is the case for ultrasound, microwaves, laser radiation, and optical waves. Coherent radiation enables measurement not only of its attenuation but also of its dephasing. The latter enables association of a depth with the measured information, because the propagation time difference results in dephasing. Each material is characterized by its attenuation coefficient and its refractive index, which describe the speed of propagation of waves in the material. In diffraction tomography, we essentially aim to reconstruct the surfaces of the interfaces between materials with different indices. In materials with complex structures, however, the multiple interferences rapidly render the phase information unusable. Moreover, sources of coherent radiation, such as lasers, are often more expensive. With X-rays, only phase contrast phenomena that are linked to the spatial coherence of photons are currently observable, using microfocus sources or synchrotrons. This concept of spatial coherence reflects the fact that an interference phenomenon may only be observed behind two slits if they are separated by less than the coherence length. In such a situation, a photon interferes solely with itself. Truly coherent X-ray sources, such as the X-FEL (X-ray free electron laser), are only emerging.
In the case of non-coherent radiation, like γ-rays, and in most cases of X-ray imaging and optical imaging with conventional light sources, each material is mainly characterized by its attenuation and diffusion coefficients. Elastic or Rayleigh diffusion is distinguished from Compton diffusion, which results from inelastic photon—electron collisions. In γ- and X-ray imaging, we try to keep attenuated direct radiation only, since, in contrast to diffused radiation, it propagates along a straight line and thus enables us to obtain a very high spatial resolution. The attenuation coefficients reflect, in the first approximation, the density of the traversed material. Diffusion tomography is, for instance, used in infrared imaging to study blood and its degree of oxygenation. Since diffusion spreads light in all directions, the spatial resolution of such systems is limited.
Having looked at the interaction between radiation and matter, we now consider the principle of generating radiation. We distinguish between active and passive systems. In the former, the source of radiation is controlled by an external generator that is activated at the moment of measurement. The object is explored by direct interrogation if the generated incident radiation and the emerging measured radiation are of the same type. This is the case in, for example, X-ray, optical, microwave, and ultrasound imaging. The obtained contrast consequently corresponds to propagation parameters of the radiation. For these active systems with direct interrogation, we distinguish measurement systems based on reflection or backscattering, where the emerging radiation is measured on the side of the object on which the generator is placed, and measurement systems based on transmission, where the radiation is measured on the opposite side. The choice depends on the type of radiation employed and on constraints linked to the overall dimensions of the object. Magnetic resonance imaging (MRI) is a system with direct interrogation, since the incident radiation and the emerging radiation are both radiofrequency waves. However, the temporal variations of the excitation and received signals are very different. The object may also be explored by indirect interrogation, which means that the generated incident radiation and the emerging measured radiation are of different types. This is the case in fluorescence imaging, where the incident wave produces fluorescent light with a different wavelength (see Chapter 6). The observed contrast corresponds in this case to the concentration of the emitter.
In contrast to active systems, passive systems rely on internal sources of radiation, which are inside the analyzed matter or patient. This is the case in magneto- and electro-encephalography (MEG and EEG), where the current dipoles linked to synaptic activity are the sources. This is also the case in nuclear emission or photoluminescence tomography, where the tracer concentration in tissues or materials is measured. The observed contrast again corresponds to the concentration of the emitter. Factors such as attenuation and diffusion of the emitted radiation consequently lead to errors in the measurements.
In these different systems, the contrasts may be natural or artificial. Artificial contrasts correspond to the injection of contrast agents, such as agents based on iodine in X-ray imaging and gadolinium in MRI, and of specific tracers dedicated to passive systems, such as tracers based on radioisotopes and fluorescence. Within the new field of nanomedicine, new activatable markers are investigated, such as luminescent or fluorescent markers, which become active when the molecule is in a given chemical environment, exploiting for instance the quenching effect, or when the molecule is activated or dissociated by an external signal.
Finally, studying the kinetics of contrasts provides complementary information, such as uptake and redistribution time constants of radioactive compounds. Moreover, multispectral studies enable characterization of flow velocity by the Doppler effect, and dual-energy imaging enables decomposition of matter into two reference materials such as water and bone, thus enhancing the contrast.
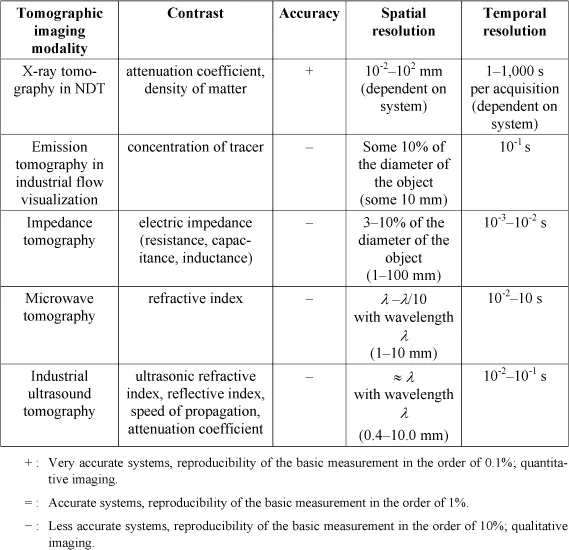
In Table 1.1, the principal tomographic imaging modalities are listed, including in particular those addressed in this book. In the second column, entitled “contrast”, the physical parameter visualized by each modality is stated. This parameter enables in certain cases, as in functional imaging, the calculation of physiological or biological parameters via a model which describes the interaction of the tracer with the organism. In the third column, we propose a classification of these systems according to their accuracy. We differentiate between very accurate systems, which are marked by + and may reach a reproducibility of the basic measurement of 0.1%, thus permitting quantitative imaging; accurate systems, which are marked by = and attain a reproducibility of the order of 1%; and less accurate systems, which are marked by — and provide a reproducibility in the order of 10%, thus allowing qualitative imaging only. Finally, in the fourth and fifth columns, typical orders of magnitude are given for the spatial and temporal resolution delivered by these systems. In view of the considerable diversity of existing systems, they primarily allow a distinction between systems with a high spatial resolution and systems with a high temporal resolution. They also illustrate the discussion in section 1.3. The spatial and temporal resolutions are often conflicting parameters that depend on how the data acquisition and the image reconstruction are configured. For example, increasing the time of exposure improves the signal-to-noise ratio and thus accuracy at the expense of temporal resolution. Likewise, spatial smoothing alleviates the effect of noise and improves statistical reproducibility at the expense of spatial resolution. Another important parameter is the sensitivity of the imaging system. For instance, nuclear imaging systems are very sensitive and are able to detect traces of radioisotopes, but need very long acquisition times to reach a good signal-to-noise ratio. Therefore, the accuracy is often limited. The existence of disturbing effects often corrupts the measurement in tomographic imaging and makes it difficult to attain an absolute quantification. We are then satisfied with a relative quantification, according to the accuracy of the measurement.
Table 1.1. Comparison of principal tomographic imaging modalities
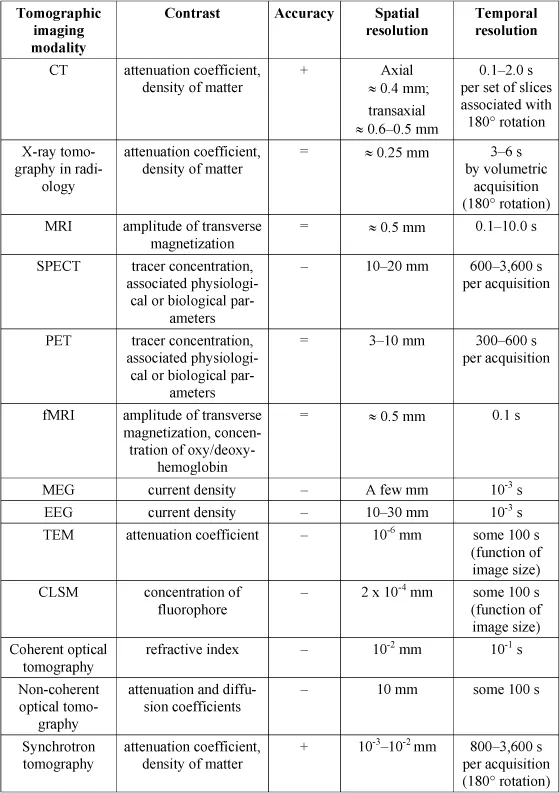
In most cases, the interaction between radiation and matter is accompanied by energy deposition, which may be associated with diverse phenomena, such as a local increase in thermal agitation, a change of state, ionization of atoms, and breaking of chemical bonds. Improving image quality in terms of contrast- or signal-to-noise ratio unavoidably leads to an increase in the applied dose. In medical imaging, a compromise has to be found to assure that image quality is compatible with the demands of the physicians and the dose tolerated by the patient. After stopping irradiation, stored energy may be dissipated by returning to equilibrium, by thermal dissipation, or by biological mechanisms that try to repair or replace the defective elements.
1.3. Localization in space and time
Tomographic systems provide images, i.e. a set of samples of a quantity on a spatial grid. When this grid is two-dimensional (2D) and associated with the plane of a cross-section, we speak of 2D imaging, where each sample represents a pixel. When the grid is three-dimensional (3D) and associated with a volume, we speak of 3D imaging, where each element of the volume is called a voxel. When the measurement system provides a single image at a given moment in time, the ...
Table of contents
- Cover
- Title Page
- Copyright
- Preface
- Notation
- Chapter 1: Introduction to Tomography
- Part 1: Image Reconstruction
- Part 2: Microtomography
- Part 3: Industrial Tomography
- Part 4: Morphological Medical Tomography
- Part 5: Functional Medical Tomography
- List of Authors
- Index
Frequently asked questions
Yes, you can cancel anytime from the Subscription tab in your account settings on the Perlego website. Your subscription will stay active until the end of your current billing period. Learn how to cancel your subscription
No, books cannot be downloaded as external files, such as PDFs, for use outside of Perlego. However, you can download books within the Perlego app for offline reading on mobile or tablet. Learn how to download books offline
Perlego offers two plans: Essential and Complete
- Essential is ideal for learners and professionals who enjoy exploring a wide range of subjects. Access the Essential Library with 800,000+ trusted titles and best-sellers across business, personal growth, and the humanities. Includes unlimited reading time and Standard Read Aloud voice.
- Complete: Perfect for advanced learners and researchers needing full, unrestricted access. Unlock 1.5M+ books across hundreds of subjects, including academic and specialized titles. The Complete Plan also includes advanced features like Premium Read Aloud and Research Assistant.
We are an online textbook subscription service, where you can get access to an entire online library for less than the price of a single book per month. With over 1.5 million books across 990+ topics, we’ve got you covered! Learn about our mission
Look out for the read-aloud symbol on your next book to see if you can listen to it. The read-aloud tool reads text aloud for you, highlighting the text as it is being read. You can pause it, speed it up and slow it down. Learn more about Read Aloud
Yes! You can use the Perlego app on both iOS and Android devices to read anytime, anywhere — even offline. Perfect for commutes or when you’re on the go.
Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app
Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app
Yes, you can access Tomography by Pierre Grangeat in PDF and/or ePUB format, as well as other popular books in Technology & Engineering & Electrical Engineering & Telecommunications. We have over 1.5 million books available in our catalogue for you to explore.