Unmanned systems and robotics technologies have become very popular recently owing to their ability to replace human beings in dangerous, tedious, or repetitious jobs. This book fill the gap in the field between research and real-world applications, providing scientists and engineers with essential information on how to design and employ networked unmanned vehicles for remote sensing and distributed control purposes. Target scenarios include environmental or agricultural applications such as river/reservoir surveillance, wind profiling measurement, and monitoring/control of chemical leaks.
Trusted by 375,005 students
Access to over 1.5 million titles for a fair monthly price.
This monograph focuses on how to design and employ unmanned systems for remote sensing and distributed control purposes in the current information-rich world. The target scenarios include river/reservoir surveillance, wind profiling measurement, distributed control of chemical leaks, and the like, which are all closely related to the physical environment. Nowadays, threats of global warming and climate change demand accurate and low-cost techniques for a better modeling and control of the environmental physical processes. Unmanned systems could serve as mobile or stationary sensors and actuators. They could save human beings from dangerous, tedious, and repetitious outdoor work, whether it is deep in the ocean or high up in the sky. With the modern wireless communication technologies, unmanned vehicles could even work in groups for some challenging missions such as forest fire monitoring, ocean sampling, and so on. However, unmanned systems still require physics-coupled algorithms to accomplish such tasks mostly in the outdoor unstructured environments. Questions such as what to measure, when to measure, where to measure, and how to control all need to be properly addressed. This monograph presents our approach about how to build and employ unmanned vehicles (ground, air, or combined) to solve the problem of distributed sensing and distributed control of agricultural/environmental systems.
1.1.1 Sensing and Control in the Information-Rich World
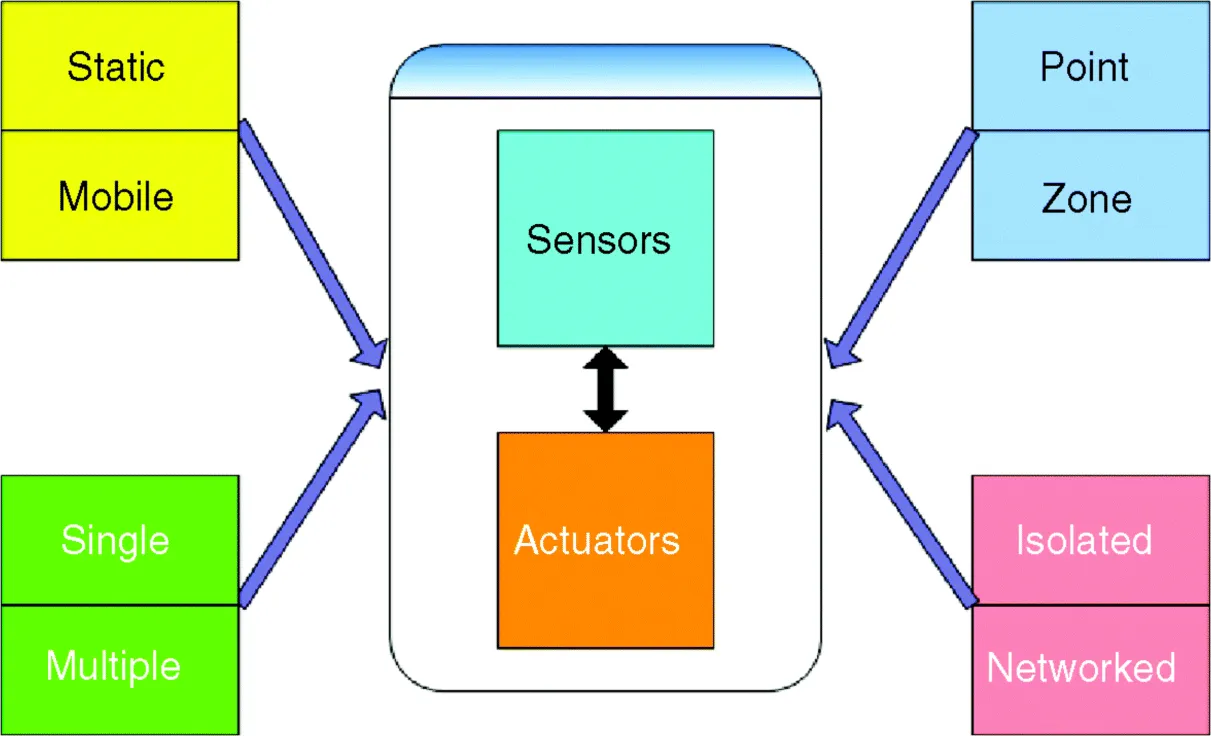
Advances in electronics technologies such as embedded systems, microelectromechanical systems, and reliable wireless networks make it possible to deploy low-cost sensors and actuators in large amounts in a large-scale system. This poses a problem for control scientists and engineers on how to deploy and employ those vast amount of networked sensors/actuators optimally. The sensors and actuators can be static or mobile, single or multiple, isolated or networked, all depending on the application scenario. The options for sensor and actuator types are shown in Fig. 1.1. For example, both the temperature probe (point-wise sensing) and the thermal camera (zone sensing) could be used to measure the temperature of the crop canopy in a given field of interest. But which one to use? Proper sensing techniques are essential for the high-precision farming that can support the sensing of a large-scale system with an acceptable cost. Thermal aerial images are better for this mission. On the other hand, there are also coarse agricultural applications, which only need the temperature probe due to the cost limits. Another typical example is to use unmanned vehicles to monitor the forest fires. It is intuitive to use multiple unmanned aerial vehicles (UAVs), since they could provide more real-time information. However, there are questions regarding what information to share among UAVs and how often to share.
Figure 1.1 Sensors and Actuators in an Information-Rich World.
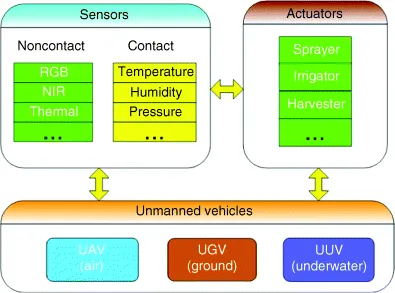
Unmanned vehicles can add the mobility to the sensors and actuators, which is especially beneficial for most outdoor environment monitoring applications. Different kinds of sensors and actuators could be installed on the unmanned vehicles based on specific application scenarios, as shown in Fig. 1.2. For instance, contact sensors can be installed on unmanned underwater vehicles (UUVs) to make accurate measurements of the temperature and humidity of the sea current. Cameras or radars can be mounted on UAVs for a more complete view of a farm or a reservoir. Chemical sprayers could be installed on unmanned ground vehicles (UGVs) for neutralizing gas leaks or extinguishing fires.
Figure 1.2 Unmanned Vehicles as Mobile Sensors/Actuators.
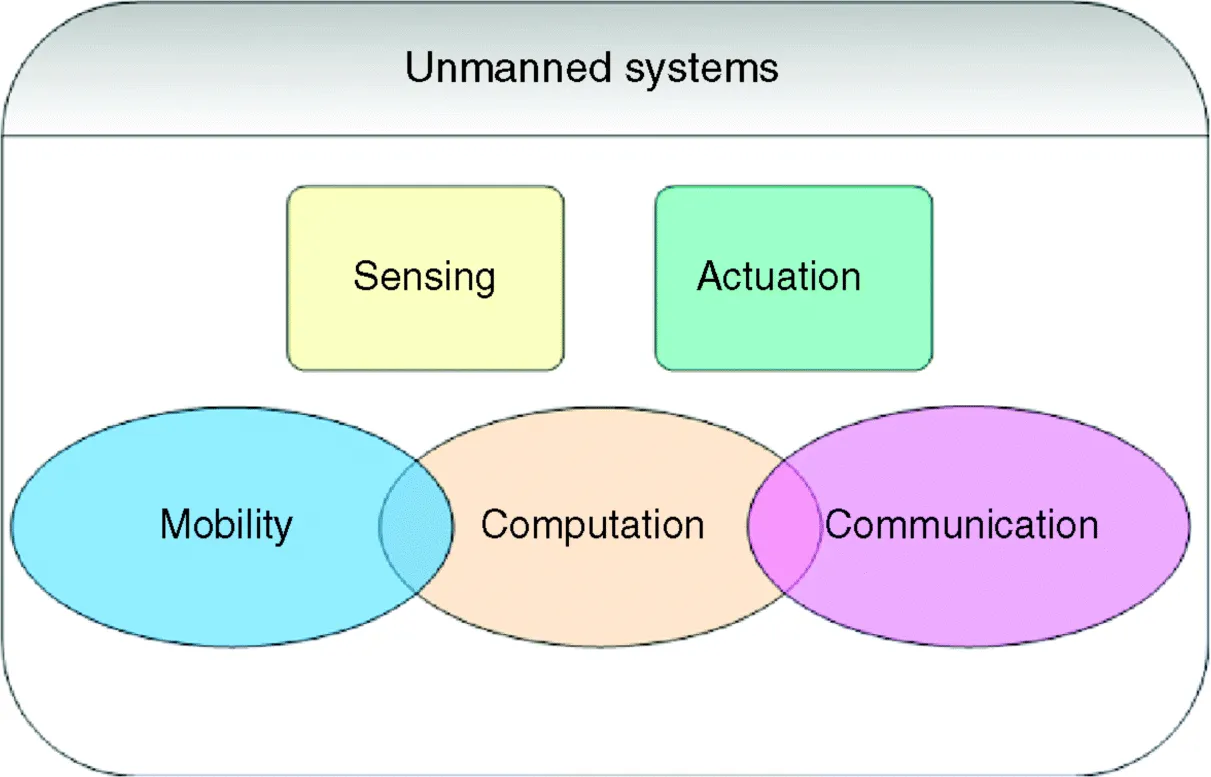
In this monograph, the unmanned system is defined as the unmanned vehicle together with onboard payload sensors or actuators. The fundamental functions of a typical unmanned systems include the mobility, computation, decision making, communication, and sensing/actuation, as shown in Fig. 1.3. Most unmanned systems have a powerful embedded processor to coordinate all the functions and make decisions based on information collected from its own or shared from other neighboring vehicles. With the communication subsystems, groups comprising of heterogeneous unmanned systems can now be designed to cooperate with each other to maximize their capabilities and the team's collective performance.
Figure 1.3 System Structures of Unmanned Vehicles.
1.1.2 Typical Civilian Application Scenarios
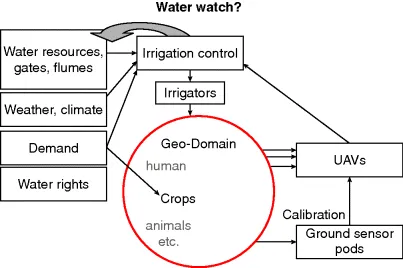
This monograph focuses mostly on the monitoring and control of environmental or agricultural systems or processes, which are of course closely related to human beings. Such systems could be categorized into two groups: fast-evolving ones such as chemical spill, gas leak, or forest fire and slow-evolving ones including heat transfer, moisture changing, wind profiling, and the like. The objective of monitoring these kinds of systems is to characterize how one or several physical entities evolve with both time and space. One typical example is an agricultural farm, as shown in Fig. 1.4. Water managers are interested in knowing how the soil moisture evolves with time in a farm to minimize the water consumption for irrigations. However, the evolution of soil moisture is affected by many other factors such as water flows, weather conditions (e.g., wind), and vegetation types, which all require measurements over a large scale (typically tens of square miles or even bigger). For such missions, ground probe stations are expensive to build and can only provide sensor data with very limited range. Satellite images can cover a large area, but have a low spatial resolution and a slow temporal update rate. Small UAVs cost less money but can provide more accurate information from low altitudes with less interference from clouds. In addition, small UAVs combined with ground and orbital sensors can form a multiscale remote sensing system, shown in Fig. 1.5.
Figure 1.4 Typical Agricultural Field (Cache Junction, UT).
Figure 1.5 Water Watch Concept.
Other typical civilian applications of unmanned systems include:
Forest Fire Monitoring and Containment Control: The monitoring, prediction, and containment control of forest fires could greatly reduce the potential property damages. Unmanned systems have obvious advantages over manned vehicles because human operators are not required onboard.
Fog Evolution or Chemical Leaking Monitoring and Control: The evolution of hazardous fogs under emergency conditions can cost human lives without accurate and real-time measurements from unmanned systems. Example harmless fog evolutions are shown in Fig. 1.6.
Wind Field Measurement: The wind direction and wind speed could have a significant impact on the diffusion of heat, water, or wind powers. However, the wind field is hard to measure because of its high variation, both temporally and spatially. Unmanned vehicles can be easily sent into the air for accurate 3D measurements.
Canopy Moisture Measurement and Irrigation Control: The moisture on the vegetation canopy represents how much water could be absorbed by the plants. This information can be used for accurate irrigation control. The large scale of most agriculture fields requires cheap sensing techniques.
Figure 1.6 Fog Evolution (Taken in Yellowstone National Park).
1.1.3 Challenges in Sensing and Control Using Unmanned Vehicles
The problem of monitoring an environmental field can be defined as below. Let Ω ⊂ R3 be a polytope including the interior, which can be either convex or nonconvex. A series of density functions
1,
1,
3, . . . are defined as
i(q, t)
[0, ∞), ∀q
Ω. For instance,
i could be wind direction, surface temperature, soil moisture level, and the like. The goal of monitoring a spatial–temporal process is to find the distribution of the required density functions:
with preset spatial and temporal resolutions. The concept of using mobile sensor and actuator network to finish the remote sensing and distributed control missions is shown in Fig. 1.7. For example, a flying sensor network is sent out to collect the information of environmental fields. The ground probe station can be used for sensing validation. A group of ground robots serve as the actuator network t...
Table of contents
Cover
Series Page
Title Page
Copyright
Dedication
List of Figures
List of Tables
Foreword
Preface
Acknowledgements
Acronyms
Chapter 1: Introduction
Chapter 2: AggieAir: A Low-Cost Unmanned Aircraft System for Remote Sensing
Chapter 3: Attitude Estimation Using Low-Cost IMUs for Small Unmanned Aerial Vehicles
Chapter 4: Lateral Channel Fractional Order Flight Controller Design for a Small UAV
Chapter 5: Remote Sensing Using Single Unmanned Aerial Vehicle
Chapter 6: Cooperative Remote Sensing Using Multiple Unmanned Vehicles
Chapter 7: Diffusion Control Using Mobile Sensor and Actuator Networks
Chapter 8: Conclusions and Future Research Suggestions
Appendix
Topic Index
Frequently asked questions
Yes, you can cancel anytime from the Subscription tab in your account settings on the Perlego website. Your subscription will stay active until the end of your current billing period. Learn how to cancel your subscription
No, books cannot be downloaded as external files, such as PDFs, for use outside of Perlego. However, you can download books within the Perlego app for offline reading on mobile or tablet. Learn how to download books offline
Perlego offers two plans: Essential and Complete
Essential is ideal for learners and professionals who enjoy exploring a wide range of subjects. Access the Essential Library with 800,000+ trusted titles and best-sellers across business, personal growth, and the humanities. Includes unlimited reading time and Standard Read Aloud voice.
Complete: Perfect for advanced learners and researchers needing full, unrestricted access. Unlock 1.5M+ books across hundreds of subjects, including academic and specialized titles. The Complete Plan also includes advanced features like Premium Read Aloud and Research Assistant.
Both plans are available with monthly, semester, or annual billing cycles.
We are an online textbook subscription service, where you can get access to an entire online library for less than the price of a single book per month. With over 1.5 million books across 990+ topics, we’ve got you covered! Learn about our mission
Look out for the read-aloud symbol on your next book to see if you can listen to it. The read-aloud tool reads text aloud for you, highlighting the text as it is being read. You can pause it, speed it up and slow it down. Learn more about Read Aloud
Yes! You can use the Perlego app on both iOS and Android devices to read anytime, anywhere — even offline. Perfect for commutes or when you’re on the go. Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app
Yes, you can access Remote Sensing and Actuation Using Unmanned Vehicles by Haiyang Chao,Yang Chen in PDF and/or ePUB format, as well as other popular books in Technology & Engineering & Civil Engineering. We have over 1.5 million books available in our catalogue for you to explore.