![]()
Chapter 1
First-Order Differential Equations
1.1 MOTIVATION AND OVERVIEW
1.1.1 Introduction
Typically, phenomena in the natural sciences can be described, or “modeled,” by equations involving derivatives of one or more unknown functions. Such equations are called differential equations.
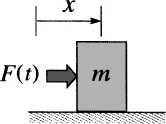
To illustrate, consider the motion of a body of mass m that rests on an idealized frictionless table and is subjected to a force F(t) where t is the time (Fig. 1). According to Newton’s second law of motion, we have
Figure 1. The motion of a mass on a frictionless table subjected to a force F(t).
in which x(t) is the mass’s displacement. If we know the displacement history x(t) and wish to determine the force F(t) required to produce that displacement, the solution is simple: According to (1), merely differentiate the given x(t) twice and multiply the result by m.
However, if we know the applied force F(t) and wish to determine the displacement x(t) that results, then we say that (1) is a “differential equation” governing the unknown function x(t) because it involves derivatives of x(t) with respect to t. Here, t is the independent variable and x is the dependent variable. The question is: What function or functions x(t), when differentiated twice with respect to t and then multiplied by m (which is a constant), give the prescribed function F(t)?
To solve (1) for x(t) we need to undo the differentiations; that is, we need to integrate (1) twice. To illustrate, suppose F(t) = F0 is a constant, so
From the calculus,
plus an arbitrary constant.
Integrating (2) once with respect to t gives
or
in which C1 and C2 are the arbitrary constants of integration. Equivalently,
in which the combined constant A = C2 – C1 is arbitrary. Integrating again gives mx = F0t2/2 + At + B, so
It is a good habit to express the functional dependence explicitly, as we did in (5) when we wrote x(t) instead of just x.
We say that a function is a solution of a given differential equation, on an interval of the independent variable, if its substitution into the equation reduces that equation to an identity everywhere on that interval. If so, we say that the function satisfies the differential equation on that interval. Accordingly, (5) is a solution of (2) on the interval –∞ < t < ∞ because if we substitute it into (2) we obtain F0 = F0, which is true for all t.
Actually, (5) is a whole “family” of solutions because A and B are arbitrary. Each choice of A and B in (5) gives one member of that family. That may sound confusing, for weren’t we expecting to find “the” solution, not a whole collection of solutions? What’s missing is that we haven’t specified “starting conditions,” for how can we expect to fully determine the ensuing motion x(t) if we don’t specify how it starts, namely, the displacement and velocity at the starting time t = 0? If we specify those values, say x(0) = x′ and x′ (0) = x′0 where x0 and x′0 are prescribed numbers, then the problem becomes
rather than consisting only of the differential
equation (2). We seek a function or functions
x(
t) that satisfy the differential equation
md2x/
dt2 =
F0 on the interval 0 <
t <
∞ as well as the conditions
x(0) =
x0 and
. We call (6b)
initial conditions, and since the problem (6) includes one or more initial conditions we call it an
initial value problem or
IVP. Application of the initial conditions to the solution (5) gives
Initial value problem is often abbreviated as IVP.
so A = mx′0 and B = mx0, and we have the solution
of (6). Thus, from the differential equation (6a), which is a statement of Newton’s second law, and the initial conditions (6b), we’ve been able to predict the displacement history x(t) for all t > 0.
Whereas the differential equation (2), by itself, has the whole family of solutions given by (5), there is only one within that family that also satisfies the initial conditions (6b), the solution given by (8).
Unfortunately, most differential equations cannot be solved that readily, merely by undoing the derivatives by integration. For instance, suppose the mass is restrained by an ordinary coil spr...