![]()
1
Automotive Internetworking: The Evolution Towards Connected and Cooperative Vehicles
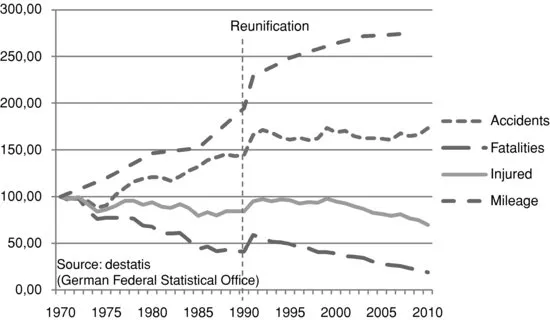
Safety on the road is one of the most important aspects of mobility: people want to be highly mobile, but they also have a great interest in travelling safely to their destinations. This is of particular importance since the request for mobility is permanently growing, and thus travelling on the road is getting more and more crowded and dangerous. According to surveys in 2009 of the Federal Statistical Office in Germany (destatis) shown in Figure 1.1, the total mileage of people travelling in Germany continuously increased, and was three times higher in 2008 compared to 1970. At the same time, the number of accidents has also increased by 70% over the past 30 years.
However, Figure 1.1 also shows that the total number of road fatalities – that is severe accidents where death results – continuously decreased in this time interval to about 25% compared to 1970. This is mainly due to the fact that both active and passive safety of the vehicles have been improved and vehicles have become more ‘intelligent’. As we will see in the following sections, this intelligence has been mainly driven by the introduction of electronics and software in vehicles, which are basically focused on the ‘autonomous perception’ of the vehicle itself, that is the vehicle only gets information about its surrounding from its own sensors. In this book, we will address the next logical step where cooperative vehicles exchange information between each other and with their environment. Experts agree that this is one of the key technologies to reduce both fatalities and the number of accidents in everyday traffic.
In the following sections, we will introduce the advances in in-vehicle electronics, and we will explain the idea of connected and cooperative vehicles. We will also define the terminology we use throughout this book, and we will introduce the different stakeholders involved in such a cooperative system. Finally, an outlook about the contents of this book concludes this chapter.
1.1 Evolution of In-Vehicle Electronics
In the 1950s, automobiles were still basically mechanical products. Vehicle development in those days was focused on the mechanical components needed to get vehicles moving quickly and safely. In the past few decades, electronics has risen as another major component of a vehicle’s value, making up around 5% in the early 1970s, growing to 20% in the 1990s and today reaching a mean share of around one third of the value of modern cars. Software has become a major part of this value share, divided approximately into 20% of sensor value, 40% of electronics hardware value and another 40% of software value. This means that the share of software has doubled within the last ten years.
The first generation of vehicle electronics were stand-alone in-vehicle systems that were basically automating or supporting certain driving tasks or comfort features. Prominent examples for systems supporting the driving task are servo (power) steering and anti-lock braking systems. Comfort-oriented systems included the car stereo, electronic windows and automated locking systems. These systems have been implemented with so-called ECUs (electronic control units). The number of ECUs in a typical mid-class vehicle has increased from only a few in the mid-to-late 1990s up to around 50 and more at the end of the first decade of the new millenium. The ECUs control almost every activity in a modern vehicle in order to improve travel comfort and safety and to reduce fuel consumption. Compared to the desktop computer market, the embedded system market has featured a far greater variety of platforms and operating environments. As a move to reduce costs, speed up development and improve quality, French vehicle manufacturers founded VDX (vehicle distributed executive) in 1988, and German vehicle manufacturers and suppliers, together with the University of Karlsruhe, founded OSEK™in 19931 in order to establish an industry standard for an open-ended architecture for distributed control units. The two consortia became one joint OSEK/VDX group in 1994. With OSEK-OS, a specification for a real-time operating system for ECUs was published. In 2005, it became an international standard as ISO 17356-3.2
Besides architecture and system platforms, special communication networks have been developed to interconnect the originally stand-alone systems. For the data exchange of ECUs in vehicles, special vehicle communication systems have been introduced. In 1983, the company Bosch developed the CAN (controller area network) bus which was used commercially in automobiles less than ten years later. Today, it is standardised as ISO 11898. The MOST (media oriented systems transport) [3] bus system defines an optical network and was introduced to satisfy multimedia requirements. Specifications are defined and published by the MOST Cooperation, which was founded in 1998. Around the same time, the LIN consortium (Local Interconnected Network) started as a working group and the first specification of the low-cost solutions-oriented LIN bus was published in 2000. The Flexray consortium was then founded in that same year and has since then defined the FlexRay as a real-time bus system. Many of these activities have been addressed by the AUTOSAR consortium (Automotive Open System Architecture) since 2003. AUTOSAR defines an in-vehicle software architecture with a purpose to support re-use, exchange and integration of software components across platforms and to integrate the different bus systems.
The in-vehicle networks allow the ECUs to exchange data and to realise ever more complex functionality. At the same time, the interface to the driver has become more complex as many of these new functions need to be controlled or interact with the driver. These in-vehicle networks also enable highly sophisticated driver assistance systems that use interconnected sensor technology to constantly monitor the vehicle’s environment. Complex sensor-actuator networks have been developed, enabling features such as active cruise control (ACC) , electronic stability programs (ESP) and night vision systems.
While complex in-vehicle networks are state of the art, they are still not or barely connected to systems outside. Hence, a vehicle today is still a relatively autonomous system, because most of the functionality of the vehicle relies on information generated by itself. During the last few years, manufacturers have started to provide connectivity to and from vehicles. BMW’s ConnectedDrive technology was the first available system establishing a communication channel between specifically equipped vehicles and a dedicated BMW back-end infrastructure. This connectivity has largely been used for driver-oriented information services like traffic or weather information, emergency call support or mobility assistance through remote vehicle diagnostics.
These features were not originally addressed directly to driving-related tasks; in fact, this type of connectivity was rather viewed as a key technology to introduce new types of applications and services to drivers. Most likely, vehicle connectivity to the outside will be restricted to the non-driving related domain and remain running through the manufacturer’s server infrastructure in the near future. Nevertheless, enabling this data exchange between vehicles and dedicated back-end systems can be seen as the origin of a ‘connected vehicle’. As new wireless communication standards have emerged, security solutions are on the horizon and hardware prices are decreasing, we presume that the next important step in-vehicle electronics will be the connectivity of vehicles with traffic infrastructure entities and other traffic participants. This connectivity will then be used not only to provide convenience services to the driver, but more importantly to improve their original task: driving. It will not be only the driver information unit, but the vehicle ECUs in general will be networked with other ECUs in other vehicles and with traffic infrastructure controllers.
1.2 Motivation for Connected Vehicles
The main motivation for the application of wireless network technology to road traffic scenarios is to optimise driving with respect to safety and efficiency. Safety has long been one of the main drivers of vehicle communications. At the end of the 20th century, when many of the bigger research activities started in North America as well as in Europe and Japan, the global number of injuries caused by road traffic accidents was close to 40 million people and the number of fatalities was almost 1.2 million people.3
Statistics from the United States Department of Transportation’s (US DoT) National Highway Traffic Safety Administration (NHTSA)4 show a total of 37,261 people killed in traffic accidents in 2008 in the United States alone, with about 2.35 million people injured. Estimates of the economic impact (from 2003) state a cost of 230 billion US Dollars related to traffic accidents.
While passive safety systems have been very effective in protecting the passengers, they will typically not help avoid the accident itself. Accident statistics show that the rate of fatalities and injuries over vehicle miles travelled has gone down in many developed countries. In the US, for instance, the injury rate was around 150 per 100 million vehicle miles travelled (VMT) around 1990, decreasing to about 120 at the turn of the millenium and going down further to less than 80 in 2010. Fatalities declined from 1.73 per 100 million VMT in the year 1995 to 1.53 in 2000 and 1.13 in 2009 the US.5 These numbers show what can be achieved with passive safety, while the total number of accidents has stayed at a high level over the last few years as the following numbers from Germany show: in 2007, 335,845 combined deaths and injuries were caused by 2.33 million accidents while in 2010, 288,297 combined deaths and injuries were caused by 2.41 million accidents.6 This is why, in addition to the proven effective passive safety systems, research has turned towards active safety systems in order to avoid a crash in the first place. Sensor technology is able to detect objects in front of and around a vehicle. However, current sensors are not able to detect objects around corners or hidden behind other objects. Therefore, data sensed by other traffic participants or roadside infrastructure is very valuable for getting a full picture of the situation a vehicle is facing. How this data can be communicated is an important part of AutoNet technology. The focus of the communication-data based applications have mainly been aimed at driver information rather than vehicle control. While one reason may be that the technological challenges are not as high, there is also justification from accident analysis.
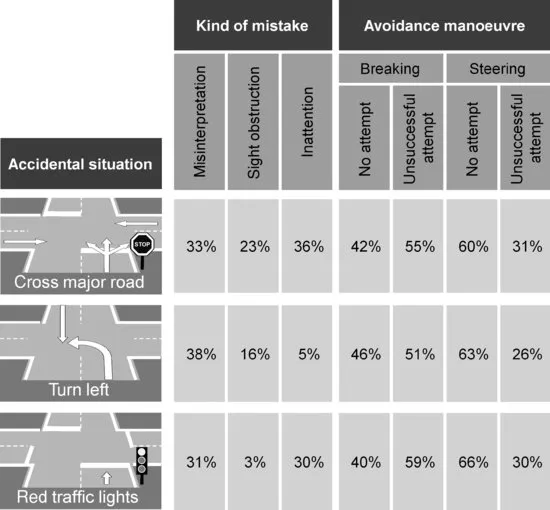
Consider three typical accident situations at an intersection as illustrated in Figure 1.2 (for more information on intersection safety, refer to [4]):
1. Turn into (or cross) a major road.
2. Turn left with oncoming traffic.
3. Red traffic lights.
Analysing accidents in each situation, the data shows that there are three main causes: misinterpretation of the situation, sight obstruction and inattention of the driver.7 Moreover, Figure 1.2 also provides data on the driver’s behaviour, showing the rate of drivers reacting not at all or reacting by either braking or steering or both. From these numbers we can draw the following two important conclusions:
1. The three kinds of mistake add up to more than 50% in each scenario; in the first scenario they make a total of 92%. All three mistakes basically occur due to the unavailability of information about the situation. If this information was available for both the vehicle and the driver, these kinds of mistake and accordingly the numbers of accidents might be diminished significantly.
2. On average about 50% of drivers did not react at all to the situation (‘no attempt’ column). The timely availability of information about the situation and support by vehicle warning and assistance systems might contribute significantly to increasing the share of (proper) reactions to the situation. This way, the accident could be potentially completely avoided or, at least, the consequences made less dramatic.
Gruendl shows in his study that an overwhelming number of accidents are caused by individual drivers’ mistakes [2]. According to this reference, the main cause of driving mistakes was that important information on the surrounding traffic and driving situation was not available in time. Nevertheless, even with complete information availa...