![]()
1 Einführung
Interaktive Assistenzsysteme umfassen ein Wissens- und Forschungsgebiet, dessen erfolgreicher Einzug in die Praxis in einigen Bereichen bereits erfolgte. Die moderne und immer älter werdende Gesellschaft benötigt aufgrund der hohen Pflegekosten zukünftig kostengünstige und wirksame Unterstützungsmöglichkeiten für ältere Personen mit eingeschränkter Mobilität. Roboter helfen den Menschen, indem sie auf Anforderung heruntergefallene Gegenstände aufheben oder diese dem Menschen bringen. Roboter-Assistenzsysteme sollen dem eingeschränkten Menschen z. B. beim Gehen helfen, intelligente Prothesen werden nicht nur durch Muskelkraft bedient, sondern Kraft- und Bewegungssensoren messen die Kräfte und interpretieren die Absichten des Trägers, bevor sie die Prothese zur Gehunterstützung aktivieren. Auch die Art der Kommunikation zwischen Mensch und Roboter ist für die Wirksamkeit der Unterstützung von großer Bedeutung. Während Prothesen durch Muskelkräfte und Bewegungsabsichten gesteuert werden, arbeiten Forscher z. B. daran, Rollstühle durch Gedanken zu bewegen. Dabei messen Elektroden Gehirnströme und leiten daraus die Bewegungsabsichten des Menschen ab. Auch die sogenannten Exoskelette helfen dem Menschen bei Bewegungsfunktionen. Sie sind wie eine äußere Haut um einzelne Körperbereiche gelegt und verstärken z. B. Kraftausübungen des Menschen. Dadurch wird z. B. das Treppensteigen erleichtert. Aber auch in der Medizin werden Manipulatoren als besondere chirurgische Instrumente eingesetzt und vergrößern die Erfolgschancen bei minimal-invasiven Eingriffen, indem sie die Bewegungen des Chirurgen unterstützen und kontrollieren.
Roboter sind bisher hauptsächlich in der Produktion zu finden. Dort werden zukünftig Roboter-Produktionsassistenten mit dem Werker zusammenarbeiten. Dadurch entstehen neue Arbeitsformen, die die Produktivität der menschlichen Arbeit erhöhen werden. Bis heute am meisten verbreitet sind allerdings die vielfältigen Fahrerassistenzsysteme im Kraftfahrzeug. Daran erkennt man eindrucksvoll die schnell wachsende Bedeutung der Assistenzsysteme. Durch die Einführung des Antiblockiersystem (ABS), der Antriebs-Schlupf-Regelung (ASR) und des elektronischen Stabilitätsprogramms ESP wurde das Autofahren sicherer und komfortabler.
Das im Jahr 1978 eingeführte ABS kann als Ursprung der fortgeschrittenen Fahrerassistenzsysteme bezeichnet werden. Es überwacht kontinuierlich das Blockieren der Bremsen, das z. B. bei einer Vollbremsung eintritt, und greift aktiv in den Bremsvorgang ein, um ein Blockieren unter allen Umständen zu verhindern. Das Fahrzeug bleibt lenkfähig und die Wirkung des Bremsens optimal. Die ständige Auswertung von Raddrehzahlsensoren durch ein Programm in einem elektronischen Steuergerät führt zur Identifikation der Blockierung. Das ABS-Programm greift aktiv in den Bremsvorgang ein und verhindert wirkungsvoll das Blockieren.
Auch das seit 1987 bei Personenkraftwagen (PKW) eingesetzte ASR nutzt die Raddrehzahlsensoren, wirkt allerdings beim Beschleunigen bzw. Anfahren. Unabhängig vom Fahrer wird der Bremsdruck gezielt auf einzelne Räder gelenkt, um ein Durchdrehen der Räder zu verhindern.
Beide Systeme, ABS und ASR, beeinflussen die Längsdynamik des Fahrzeugs, also die Bewegung in Fahrtrichtung.
Seit 1995 wird das ESP-System in PKWs eingesetzt, das die Querdynamik des Fahrzeugs kontrolliert. Es unterstützt den Fahrer z. B. beim Beschleunigen oder Abbremsen in der Kurve. Während beim Bremsen in der Kurve sich das Fahrzeug stärker in die Kurve hineindreht, also übersteuert, erfolgt beim Beschleunigen in der Kurve eine Änderung der Achslastverteilung in Richtung Hinterachse. Das hat zur Folge, dass das Fahrzeug in Richtung des Außenradius der Kurve geschoben wird. Dieser Vorgang wird als Untersteuerung bezeichnet. Das ESP-Steuerprogramm bremst gezielt einzelne Räder, um die Stabilität des Fahrzeugs in der Kurve zu gewährleisten.
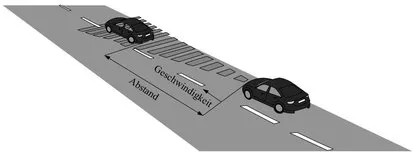
Schaut man in die Prospekte der Autoindustrie, findet man unter der Rubrik „Fahrerassistenzsysteme“ eine ganze Reihe verschiedener mehr oder weniger wichtiger Assistenzsysteme. Beispiele sind die automatische Distanzregelung (ACC – Adaptive Cruise Control) und das Umfeldbeobachtungssystem „Front Assist“ mit City-Notbremsfunktion oder die dynamische Fernlichtregulierung „Dynamic Light Assist“. Weiterhin werden z. B. angeboten: der Spurhalte-, Spurverlassens- und Spurwechselassistent „Lane Assist“ oder der Parklenkassistent.
Abb. 1: Fahrerassistenzsystem: Adaptive Cruise Control
Wir wollen versuchen, den Begriff Fahrerassistenzsystem, der sich aus den Begriffen Fahrer, Assistent und System zusammensetzt, zu erklären. Ein Fahrer ist bekanntermaßen eine Person, die ein Kraftfahrzeug fährt. Der Assistent als Mitarbeiter in einer Arbeitsorganisation unterstützt in der Regel eine Person bei einer Arbeit. Unter einem Assistenzsystem versteht man eine technische Einrichtung, die meist von einem Rechner gesteuert wird und den Menschen bei einer Tätigkeit unterstützen soll. Der Fahrer erhält Beistand oder Hilfe von einem technischen System. Ein System ist die Gesamtheit von Objekten, die sich in einem ganzheitlichen Zusammenhang befinden und durch die Wechselbeziehungen untereinander gegenüber ihrer Umwelt abzugrenzen sind. Das Assistenzsystem besteht aus elektronischen, informationstechnischen und/oder mechanischen Komponenten, die im Sinne des Systems als Objekte mit der Umwelt in Wechselbeziehungen stehen.
Nach dieser Erklärung sind auch wesentlich einfachere Hilfsmittel, wie z. B. die automatische Blinkerrückstellung, der Starter oder ein synchronisiertes Handschaltgetriebe technische Systeme, die den Fahrer bei seiner Aufgabe unterstützen. Die bereits erwähnten, verfügbaren
Fahrerassistenzsysteme verfügen über viel weitergehende Fähigkeiten. Wie bereits beim ABS-System erläutert wurde, spielt die kontinuierliche Messung der Raddrehzahl und deren richtige Interpretation in diesem Beispiel eine bedeutende Rolle. Die objektive Beurteilung von Fahrsituationen mit Hilfe von Sensoren ist ein wesentliches Merkmal von Fahrerassistenzsystemen. Dadurch sind sie in der Lage, vollständig oder teilweise Aufgaben des Menschen beim Fahren zu übernehmen. Während die Auswertung der Raddrehzahlsensoren zuverlässig und meist eindeutig erfolgen kann, sind viele Fahrerassistenzsysteme mit komplexen Sensoren, wie Kameras oder Radarsensoren, ausgestattet. Diese Sensoren liefern wesentlich mehr Informationen als z. B. nur die Fahrgeschwindigkeit. Es können Fußgänger oder andere Fahrzeuge erkannt und deren Geschwindigkeit oder Entfernung gemessen werden. Allerdings sind die Informationen dieser Sensoren richtig zu interpretieren. Aufgrund von Störungen, die durch das Wetter oder die Beschaffenheit der zu erkennenden Objekte bedingt sind, können die Sensorinformationen falsch oder gar nicht interpretiert werden.
Die Fahrerassistenzsysteme, die solche Sensoren nutzen, müssen die zu den Informationen gehörenden Interpretationen richtig deuten. Es handelt sich um Fahrerassistenzsysteme mit maschineller Wahrnehmung. Sie bieten meist eine Unterstützung in bestimmten Situationen an. Die sensorischen Informationen werden interpretiert und es können sich Fehlinterpretationen ergeben. Daher arbeiten Assistenzsysteme mit dem Menschen gemeinschaftlich an einer Aufgabe. Der Mensch kann die Arbeit des Assistenzsystems jederzeit unterbrechen.
Bei der automatischen Distanzregelung werden vorausfahrende Autos meist aufgrund der Auswertung reflektierter Laserstrahlen identifiziert. Der Spurhalte-Assistent interpretiert Hell-Dunkel-Übergänge eines Kamerabildes als Fahrstreifenbegrenzungslinien. Wir folgern, dass die Fahrerassistenzsysteme mit maschineller Wahrnehmung Informationen, die von Sensoren stammen, beurteilen müssen. Diese Beurteilung ist mit einer erhöhten Fehlermöglichkeit versehen. Denn die Messung der Hell-Dunkel-Übergänge könnte auch von Farbresten einer Baustellenmarkierung stammen. Die automatische Regelung des Fahrzeugs aufgrund der Messwerte ist heute noch zu unsicher. Daher ist es erforderlich, dass sowohl der Mensch als Fahrer als auch das technische System an derselben Aufgabe gleichzeitig arbeiten. Der Fahrer beurteilt die Vorschläge des Assistenzsystems kontinuierlich, um zu entscheiden, ob weiterhin dem Vorschlag des Systems gefolgt werden kann. Wir folgern aus den letzten Ergebnissen, dass Assistenzsysteme von automatischen Systemen zu unterscheiden sind. Die Assistenzsysteme unterstützen den Menschen, indem sie dessen Ziele kennen und Wahrnehmungen des Menschen nachvollziehen können. Sie müssen in der Lage sein, dem Menschen die ermittelten Ergebnisse ausdrucksfähig mitzuteilen.
Es besteht die Gefahr, dass der Fahrer dem Assistenzsystem blind vertraut und bei eventuellen Fehlern des Systems zu spät die Kontrolle übernimmt. Es ist wichtig, die Informationen der Assistenzsysteme dem Menschen in einer geeigneten Form bereitzustellen. Das wirft die Frage auf, wie die Bedien- und Anzeigemöglichkeiten gestaltet werden müssen, damit der Fahrer das System kritisch und aufmerksam nutzt. Der Mensch muss die Vorschläge des Assistenzsystems eindeutig, schnell und fehlerfrei interpretieren können. Wir haben gesehen, dass in Kraftfahrzeugen mehrere Assistenzsysteme gemeinsam arbeiten können. Es stellt sich die Frage, wie deren Informationen in geeigneter eindeutiger Weise dem Menschen präsentiert werden können. Kann der Mensch die vielen Informationen überhaupt noch kritisch und fehlerfrei bewerten, um die richtige Schlussfolgerung und Handlung zu vollziehen? Man bezeichnet
die Schnittstelle zwischen dem Assistenzsystem und dem Menschen als Mensch-Maschine-Schnittstelle. Für die Entwicklung geeigneter Mensch-Maschine-Schnittstellen gibt es ergonomische und psychologische Grundsätze, die beachtet werden müssen.
Die sensorischen und kognitiven Fähigkeiten des Menschen müssen bei der Entwicklung und Beurteilung der Mensch-Maschine-Schnittstellen genau beachtet werden. Die Auswahl, Form und Anbringung der Bedienelemente, wie Schalter, Hebel, Tasten, spielt eine entscheidende Rolle für deren schnelle und richtige Nutzung. Assistenzsysteme sollten sich also ähnlich verhalten, wie es der Mensch gewohnt ist. Die Art und Weise, wie der Mensch mit der Umgebung interagiert, sollte auch bei der Kommunikation zwischen Assistenzsystem und Mensch berücksichtigt werden. Die sensorischen und kognitiven Fähigkeiten des Menschen müssen bei der Entwicklung von Assistenzsystemen genau beachtet werden. Die Nichtbeachtung dieser (manchmal) beschränkten Fähigkeiten kann zu Situationen führen, in denen der Mensch Meldungen eines Assistenzsystems missversteht oder missdeutet. Die grundlegenden Möglichkeiten der Interaktion zwischen dem Menschen und einem Assistenzsystem beruhen also auf den menschlichen Formen der Wahrnehmung.
Der Mensch muss die Entwicklung von Prozessen anhand von Informationen beobachten. Der Fahrer eines Autos z. B. beobachtet die Instrumente und die Umwelt und zieht daraus Schlüsse für sein Fahrverhalten. Der Pilot eines Verkehrsflugzeugs checkt vor dem Start alle wichtigen Systeme nach einem genauen Plan. Während des Flugs beobachtet er die Instrumente und überwacht den Autopiloten. Wenn eine plötzliche, ungewohnte Situation eintritt, muss der Pilot die richtige Entscheidung schnell fällen. Es ist erforderlich, dass der Pilot die Instrumente und Darstellungen auf dem Monitor richtig und schnell interpretieren und schnell die Bedien-oder Stellteile finden und benutzen kann. Das menschliche Verhalten spielt bei der schnellen Entscheidung eine wichtige Rolle, denn der Pilot hat über Jahre eine Vorstellung über Flugsituationen erlernt und vergleicht eine neue, ungewohnte Situation damit. Er entscheidet im Notfall intuitiv.
Die Kommunikation mit Assistenzsystemen kann sehr vielfältig sein. Sie reicht von der Tastenbetätigung über die taktile Kommunikation, Spracherkennung bis zur Gestenerkennung. Die bisher wenig genutzte Interaktionsform über die haptische Wahrnehmung sollte als möglicher Interaktionskanal in Betracht gezogen werden, wenn andere Sinneskanäle bereits beschäftigt sind. In letzter Zeit werden in steigender Zahl Fahrerassistenzsysteme mit haptischer Wahrnehmung angeboten. Fahrerassistenzsysteme machen den Fahrer z. B. durch einen kurzen Bremsruck oder eine Vibration des Lenkrades auf besondere Situationen aufmerksam.
Assistenzsysteme nutzen Interaktionsgeräte wie z. B. die bekannten Touchscreens und Kamerasysteme. Gerade Kamerasysteme werden mehr und mehr in Assistenzsystemen eingesetzt. Die Gestenerkennung wird in zukünftigen Computer-Interaktionen eine wesentliche Rolle spielen. Die Multi-Touch-Technik ist nur die erste Stufe der Gestenerkennung hin zur dreidimensionalen Gestenerkennung, die bereits den Einzug in viele Anwendungen gefunden hat.
Die Abgrenzung der Assistenzsysteme zu sonstigen manuellen oder automatischen Systemen erfolgt in Kapitel 2. Das Buch behandelt wesentliche Gesichtspunkte der Mensch-Maschine-Schnittstelle und Interaktion und gibt Gestaltungsregeln für die Ausführung an. Die Grundlagen für Mensch-Maschine-Schnittstellen, die in der Ergonomie und Psychologie entwickelt wurden, werden in Kapitel 3 behandelt. Denn diese Grundlagen sind für Assistenzsysteme, die den Menschen unterstützen sollen, von großer Bedeutung. Das Buch vereint diese aus der Geisteswissenschaft
stammenden Grundlagen mit den technischen Grundlagen der Robotik und Bildverarbeitung. Die Robotersysteme werden in dem vorliegenden Buch als Anwendungsbeispiel der Assistenzsysteme ausführlich in Kapitel 4 behandelt. Es werden mathematische Verfahren zur Beschreibung wichtiger Zusammenhänge genutzt. Die ComputerVision-Systeme dienen der Erweiterung der sensorischen Fähigkeiten von Roboter- und Fahrerassistenzsystemen. Deren Grundlagen werden ausführlich in Kapitel 5 dargestellt.
Das Buch ist so strukturiert, dass in den Kapiteln 2 und 3 wichtige allgemeine Grundlagen zu Assistenzsystemen behandelt werden. Die Kapitel 4 und 5 nutzen mathematisch orientierte Methoden zur Beschreibung technischer Vorgänge. Wichtige Definitionen werden in Kästen hervorgehoben. Kontrollaufgaben und Kurzzusammenfassungen am Abschnittsende sollen als weitere didaktische Maßnahmen das Verständnis erleichtern. Viele Berechnungen und grafische Darstellungen wurden mit Programmen durchgeführt. Genutzt wurden u. a. die folgenden Programme:
- MATLAB: Firma MathWorks, Berechnungen, Zeit-Linien-Diagramme, Roboter-Darstellungen
- WINFACT/Boris: Firma Ingenieurbüro Dr. Kahlert, Simulation von Roboter-Plattformen, Zeit-Linien-Diagramme, Simulation von Systemen
- FAMOS Robotic: Firma carat robotic innovation, Darstellung von 3D-Roboterposen, Erzeugung von Roboterprogrammen
- MIL (Matrox Imaging Library): Firma Matrox Electronic Systems, Bildverarbeitung
Zusammenfassung
Assistenzsysteme werden mehr und mehr in Kraftfahrzeugen eingesetzt. Sie nehmen sensorisch Informationen der Umgebung oder des Kraftfahrzeugs auf. Eine wesentliche Eigenschaft der Assistenzsysteme ist die maschinelle Wahrnehmung. Die sensorischen Informationen werden interpretiert und es können sich Fehlinterpretationen ergeben. Daher arbeiten Assistenzsysteme mit dem Menschen gemeinschaftlich an einer Aufgabe. Der Mensch kann die Arbeit des Assistenzsystems jederzeit unterbrechen. Eine wichtige Komponente bei der Gestaltung von Assistenzsystemen ist die Mensch-Maschine-Schnittstelle.
Kontrollfragen
| K1 |
Formulieren Sie die Definition von „System“. |
| K2 |
Welche Haupteigenschaften besitzt ein Assistenzsystem? |
![]()
2 Anwendungen und Abgrenzung vonAssistenzsystemen
In diesem Abschnitt sollen wesentliche Merkmale eines Assistenzsystems noch einmal klar herausarbeitet werden. Je nachdem, wie eng der Begriff Assistenzsystem gefasst wird, kann auch der Rückstellvorgang des Blinkhebels als Assistenzsystem aufgefasst werden. Selbst der automatische Kaffeeautomat könnte als Assistenzsystem gedeutet werden. Doch wir wollen den wesentlichen Unterschied formulieren und verschiedene Anwendungen als Beispiele erarbeiten.
Dabei betrachten wir nicht nur Fahrer- oder Pilotenassistenzsysteme, sondern auch Assistenzsysteme, die aus der Robotik stammen und zukünftig den Menschen unterstützen sollen. Dabei kann sich die Unterstützung z. B. auf Hilfsdienste, wie Pflegedienste, Hol- und Bringdienste, soziale Dienste, medizinische Dienste, Haushalts- oder Hausdienste, aber auch auf industrielle Arbeiten beziehen.
2.1 Abgrenzung
Beim Entwurf von Maschinen spielen nicht nur die technischen Spezifikationen eine bedeutende Rolle, sondern auch die Art und Weise der Bedienung. Genauso ist es im Auto, die Bedienbarkeit von Assistenzsystemen spielt eine dominante Rolle bei der Akzeptanz und damit be...