In tutto il mondo i velivoli SAPR (Sistemi Aeromobili a Pilotaggio Remoto) stanno incontrando un sempre maggiore interesse da parte di migliaia di persone. Dagli appassionati (o curiosi di capire che cosa accade sopra la nostra testa) a chi decide di utilizzarli per applicazioni professionali, i cosiddetti "droni" stanno diventando un fenomeno di interesse planetario. Questo volume nasce, quindi, con lo scopo di coprire due aree principali: da un lato un approfondimento tecnologico (e perché no commerciale) sulle nuove macchine volanti; dall'altro, l'area delle possibili applicazioni civili e quello che sta succedendo in Italia e nel mondo. Anche se su tutto c'è un'unica certezza: siamo solo all'inizio! Quali modelli sono disponibili oggi sul mercato? • Come risparmiare nell'acquisto? • Le migliori centraline e i software di controllo • Preparare il laboratorio • Utilizzi possibili • Commento al nuovo regolamento ENAC

- 160 pages
- English
- ePUB (mobile friendly)
- Available on iOS & Android
eBook - ePub
About this book
Trusted by 375,005 students
Access to over 1.5 million titles for a fair monthly price.
Study more efficiently using our study tools.
Information
Subtopic
Science GeneralIndex
Biological SciencesSEZIONE 1
“COSA ESSERE TU?”
(il Brucaliffo ad Alice, Alice nel paese delle meraviglie – Walt Disney)
Capitolo 1
PARTIAMO DAL PRINCIPIO
Oggi è possibile entrare in un negozio di giocattoli (una bancarella! Un centro commerciale!) e trovare un piccolo modello a 4 rotori da fare volare con un radiocomando, il tutto per poche decine di euro. Wait a minute! Mi sono perso qualcosa? Come si è arrivati a questo punto?
Il termine stesso “drone” ha un’origine non certissima: dal punto di vista del significato di uso comune i vocabolari in generale riconducono al significato di “fuco”, cioè il maschio dell’ape, e il relativo ronzio. Viceversa l’etimologia rimanda al greco “thrènos”, cioè “canto, lamento funebre” (per l’uso di intonare un suono basso, continuo e monotonico nell’accopagnamento della salma verso e durante l’accensione della pira funeraria nell’antica Grecia), da cui l’associazione al ronzio del fuco durante il volo.
La storia dei velivoli a pilotaggio remoto va molto indietro nel tempo, con esperimenti di vario genere, più che altro realizzati sfruttando palloni aerostatici. Come al solito, il “propellente creativo” era di natura militare, per cui i primi APR avevano come scopo quello di spedire qualcosa di deflagrante oltre le linee nemiche come regalo inaspettato, attorno alla metà dell’Ottocento. Gli storici identificano in un attacco dell’esercito Austriaco, portato ai danni della città di Venezia, il primo esempio “sul campo” di questa tecnologia, datato 1849. In quell’occasione, però, una parte dei palloni lanciati da una nave ricadde sullo stesso esercito austriaco, e probabilmente fu in quel momento che nacque l’idea di poter disporre di un dispositivo che ne consentisse il vero controllo remoto.
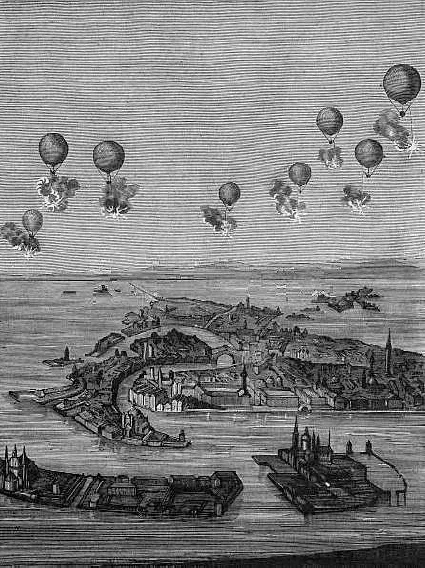
Figura 1.1 – Una riproduzione dell’attacco austriaco nei cieli di Venezia effettuato con l’ausilio di palloni caricati con esplosivo.
Fonte: Wikipedia.
Fonte: Wikipedia.
Nei tempi successivi, l’uso di mezzi più leggeri dell’aria per compiere azioni offensive al di là delle linee nemiche, o per contrastare altri mezzi volanti, continuò a essere sviluppato. Ed è durante la Prima Guerra Mondiale che, grazie all’uso delle onde radio in AM, si vedono i primi velivoli effettivamente pilotati in remoto: di fatto, dei veri e propri missili radiocomandati che dovevano, tra l’altro, contrastare gli Zeppelin utilizzati sia per ricognizione sia per bombardamento.
È negli Stati Uniti che, attorno al 1930, si vede il consolidamento dell’uso delle onde radio in modulazione di ampiezza (appunto, AM) per costruire modelli radiocomandati. Nasce, di fatto, l’aeromodellismo come hobby di massa, e naturalmente proseguono le esperienze di natura militare. Teniamo presente l’aspetto curioso per il quale la tecnologia dei radiocomandi in AM è sopravvissuta fino a 4-5 anni fa, quando è stata di fatto sostituita, sul mercato “di massa”, dalle radio a tecnologia spread spectrum, come vedremo meglio più avanti.
Ancora una volta è la guerra che fa da acceleratore della ricerca, anche in questo settore: tutti gli schieramenti cercano di sviluppare prodotti in grande serie, che consentano di controllare velivoli a medio e corto raggio senza piloti a bordo, sia con fini offensivi sia di ricognizione. Pochi sanno, per esempio, che tutti gli esperimenti che hanno portato allo sviluppo della bomba atomica sono stati effettuati (anche) con aerei radiocomandati: nel tristemente famoso esperimento dell’atollo di Bikini, l’aviazione americana trasformò 8 bombardieri B-17 “fortezze volanti” in altrettanti giganteschi aeromodelli radiocomandati, che venivano controllati al decollo da postazioni terrestri e poi agganciati in volo a “piloti” collocati su altri aerei che li seguivano. In questo modo fu possibile raccogliere dati sulle condizioni di radioattività dei territori colpiti a grande distanza.

Figura 1.2 – Un B-17 “fortezza volante” utilizzato dall’aviazione americana durante la Seconda Guerra Mondiale e trasformato per alcuni esperimenti in velivolo controllato a distanza.
Fonte: Wikipedia.
Fonte: Wikipedia.
Successivamente, il concetto di controllo remoto applicato agli aerei fu spinto da altri progetti.
APR vennero costruiti in grande scala per essere utilizzati come bersagli mobili, raggiungendo via via livelli sempre più sofisticati. Si iniziò a dotare i velivoli di telecamere, e vere e proprie stazioni di comando a terra furono costruite e implementate per rendere la vita difficile ai piloti da combattimento in fase di addestramento e test.
La corsa verso lo spazio fu un altro settore di grande sviluppo per la tecnologia remota: nelle fasi del raggiungimento della velocità MACH-1, cioè 1 volta quella del suono, e via via a crescere maggiormente, fino ad allontanarsi sempre di più dalla superficie terrestre, furono impiegati e sacrificati molti sistemi radiocomandati prima di testare il controllo umano nelle missioni reali. Così, negli anni, come in tanti settori, la tecnologia ha continuato a svilupparsi sia per impieghi militari sia civili. L’aeromodellismo, come si è visto, ha le sue origini addirittura negli anni Cinquanta del secolo scorso, e ha visto modelli sempre più sofisticati e in grado di offrire prestazioni sempre più esasperate.
Oggi la parola “drone” fa pensare a qualcosa di molto recente, e in effetti è solo negli ultimi anni che è divenuto un termine di uso comune. Molti la associano al concetto di “velivolo multirotore”, ma in realtà, come si vedrà nel prossimo capitolo, è un termine molto più ampio, anche se questo volume sarà appunto dedicato principalmente a questo tipo di velivoli.
I multirotori, come vedremo tra poco, sono una specie di elicottero basato però su 3, 4, 6, 8 o in casi rari addirittura 12 motori/eliche. Questo tipo di velivolo è, sì, relativamente recente, ma il concetto vero di “drone”, nel senso di veicolo controllato da lontano, come si è visto parte da molto più lontano.

Figura 1.3 – DJI S1000+, uno dei più moderni esempi di velivolo a controllo remoto “multirotore”, utilizzato per applicazioni civili quali riprese aeree o altro.
Fonte: DJI website.
Fonte: DJI website.
Capitolo 2
C’È DRONE E DRONE
Come abbiamo visto, il concetto di “drone”, termine tutto sommato divenuto di uso comune, si sovrappone a quello di un veicolo che:
•è in grado di mantenersi in movimento nello spazio per un tempo determinato,
•è controllato in remoto da un pilota,
•a bordo ha componenti elettronici che aiutano il pilota nel mantenimento dell’assetto, della rotta e delle operazioni,
•molto spesso, è dotato di dispositivi supplementari (termocamere, macchine fotografiche, sensori di gas eccetera) che ne estendono le funzionalità per compiti specifici.
A differenza di un robot, il drone non è in grado di svolgere mansioni in autonomia, ma di fatto è un’estensione, una propaggine estesa del corpo umano controllata comunque da un operatore specializzato.
Non è nemmeno un “esoscheletro rinforzato”, di quelli che amplificano le potenzialità del singolo individuo e che, dai film di fantascienza, cominciano a comparire in scenari di guerra o di intervento specializzato: in questo tipo di veicoli il pilota è, a tutti gli effetti, parte integrante del sistema, e non c’è la componente di controllo remoto.
Nell’ambito di questo insieme più esteso di veicoli possiamo effettuare una successiva serie di classificazioni:
•ambito d’uso (terrestre, aereo, marino);
•alimentazione (elettrica, con motore a combustione interna, nessuna);
•campi di utilizzo (militare, civile).
In questo testo ci vogliamo occupare solo di una parte di questi veicoli, che in questo momento sono particolarmente interessanti, vuoi per la notorietà dovuta all’attenzione dei media e vuoi per le opportunità commerciali e professionali che si stanno aprendo sui mercati di tutto il mondo. In pratica, quindi, ci limiteremo a parlare di quei veicoli che rientrano nella definizione operativa, e se vogliamo “burocratica” di APM o, in inglese UAV: Aeromobile a Pilotaggio Remoto, o Unmanned Aerial Vehicle. In lingua inglese esistono anche altre sigle, ma questa è quella più diffusa e, all’atto pratico, identificano tutti la stessa cosa.
Inoltre, daremo copertura alle applicazioni di tipo civile, rimandando gli impieghi militari ad altri e ben più qualificati autori e trattati.
Possiamo così suddividere la famiglia degli APR civili in due categorie, ciascuna con vantaggi e svantaggi:
•APR ad ala fissa e portante;
•APR multirotore.
I primi sono molto simili a un aereo vero e proprio; spesso sono realizzati in materiali leggerissimi (polistirolo, legno di balsa) e hanno una forma grossomodo triangolare. Il vantaggio di questo tipo di APR risiede nella grande capacità di planata: in questo modo è possibile montare un piccolo motore elettrico per raggiungere la quota desiderata, e poi limitarne l’uso solo per correggere la rotta o riguadagnare altezza. In questo modo, il velivolo è in grado di rimanere in volo anche per lunghi periodi di tempo, pur con piccole batterie e mantenendo un peso molto leggero. Sono, quasi sempre, dotati di videocamera o fotocamera, e sono impiegati per ricognizione o fotografia aerea.

Figura 2.1 – Un esempio di velivolo “tutt’ala”, caratterizzato dalla grande portanza e quindi dalla capacità di rimanere in aria a lungo anche senza l’ausilio di motore.
Fonte: Wikipedia.
Fonte: Wikipedia.
Questo tipo di volo planato, però, ha una serie di limiti: è fortemente soggetto a turbolenza, soprattutto per la grande superficie alare unita alla leggerezza del mezzo. Inoltre, è impossibile scendere sotto una certa velocità di spostamento, quindi può risultare difficile effettuare riprese video “mirate” su un certo soggetto: per esempio, per riprendere una persona che cammina, o un edificio ecc. Per contro, sono utilissimi per ricognizione, dove è necessario operare con una visione di insieme più che in funzione di soggetti specifici, o per la raccolta di foto di grandi superfici, per esempio per applicazioni di fotogrammetria di terreni o edifici.
La seconda categoria di APR, quella dei multirotori, in questo momento forse è la più diffusa. Sono velivoli dotati di più motori elettrici, controllati da un sistema elettronico centrale, il quale decide quale velocità di rotazione assegnare alle singole eliche. La somma delle forze dei diversi motori consente di mantenere il velivolo in equilibrio nell’aria o di spostarlo in modo molto preciso. I multirotori vengono impiegati per tutte quelle operazioni in cui il volo debba essere basato su rotte molto precise e lento spostamento, fino a rimanere fermi nell’aria (hovering): dalle riprese cinetelevisive al monitoraggio di impianti, al controllo di sicurezza per eventi e manifestazioni, fino all’accesso in zone difficili o impossibili da raggiungere, i multirotori oggi vengono impiegati in moltissimi contesti operativi.
Per contro, un multirotore è impossibilitato a effettuare un volo planato, per cui per mantenersi in aria ha necessità di un continuo funzionamento dei motori, che soprattutto in caso di velivoli di significative dimensioni e peso hanno una poderosa fame di corrente elettrica e relativo consumo di batterie.
Oggi, l’autonomia di volo media è di circa 10-15 minuti, anche se esistono molti APR commerciali in grado di rimanere in aria per 30 o persino 60 minuti. Queste ultime, però, sono autonomie ancora limitate a mezzi molto particolari e dai costi molto significativi.
Nelle pagine successive approfondiremo la tecnologia dei multirotori e i componenti necessari.
2323__perlego__chapter_divider_...Table of contents
- COVER
- FRONTESPIZIO
- COPYRIGHT
- INDICE
- INTRODUZIONE
- SEZIONE 1: “COSA ESSERE TU?”
- SEZIONE 2: “MI CHIAMO APR, RISOLVO PROBLEMI”
- FLY ME TO THE MOON
- L'AUTORE
- RINGRAZIAMENTI
- INFORMAZIONI SUL LIBRO
Frequently asked questions
Yes, you can cancel anytime from the Subscription tab in your account settings on the Perlego website. Your subscription will stay active until the end of your current billing period. Learn how to cancel your subscription
No, books cannot be downloaded as external files, such as PDFs, for use outside of Perlego. However, you can download books within the Perlego app for offline reading on mobile or tablet. Learn how to download books offline
Perlego offers two plans: Essential and Complete
- Essential is ideal for learners and professionals who enjoy exploring a wide range of subjects. Access the Essential Library with 800,000+ trusted titles and best-sellers across business, personal growth, and the humanities. Includes unlimited reading time and Standard Read Aloud voice.
- Complete: Perfect for advanced learners and researchers needing full, unrestricted access. Unlock 1.5M+ books across hundreds of subjects, including academic and specialized titles. The Complete Plan also includes advanced features like Premium Read Aloud and Research Assistant.
We are an online textbook subscription service, where you can get access to an entire online library for less than the price of a single book per month. With over 1.5 million books across 990+ topics, we’ve got you covered! Learn about our mission
Look out for the read-aloud symbol on your next book to see if you can listen to it. The read-aloud tool reads text aloud for you, highlighting the text as it is being read. You can pause it, speed it up and slow it down. Learn more about Read Aloud
Yes! You can use the Perlego app on both iOS and Android devices to read anytime, anywhere — even offline. Perfect for commutes or when you’re on the go.
Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app
Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app
Yes, you can access L'invasione dei droni by Roberto Alfieri in PDF and/or ePUB format, as well as other popular books in Biological Sciences & Science General. We have over 1.5 million books available in our catalogue for you to explore.