1.1 HUMAN-ROBOT INTERACTIONS: AN OVERVIEW
Human-robot interactions (HRI) have been recognized to be a key element of future robots in many application domains such as manufacturing, transportation, service, and entertainment. In factories, robots are expected to collaborate with human workers [109]. Manufacturers are interested in combining human’s flexibility and robot’s productivity in flexible production lines [102]. In transportation systems, autonomous vehicles are expected to interact with various road participants, including human-driven vehicles and pedestrians. In hospitals, medical robots are expected to help doctors to perform surgeries on patients. Exoskeleton robots are expected to assist stroke patients to walk [100]. Nursing robots [169] are expected to take care of patients. Robot guide dogs [203] are expected to help blind people.
These applications entail huge social and economic impacts [52, 34]. Future robots are envisioned to be acting like humans, which are independent entities that make decisions for themselves; intelligent actuators that interact with the physical world; and involved observers that have rich senses and critical judgements. Most importantly, they are entitled social attributions to build relationships with humans [63]. We call these robots co-robots.
Technically, it is a challenge to design the behavior of co-robots. Unlike conventional robots that work in structured and deterministic environments, co-robots need to operate in highly unstructured and stochastic environments. The skill sets that have been developed for conventional robots can no longer meet the needs of corobots. This book explores methodologies to equip co-robots with desired skill sets, in order to enable wide adoption of co-robots in various interactive environments, as mentioned earlier. The fundamental research question to address in this book is how to ensure that co-robots operate efficiently and safely in dynamic uncertain environments. Regarding broadness and complexity of HRI [52], the following four aspects of the fundamental question are considered:
Diverse modes of interactions
The potential applications of co-robots lie in various domains, with different modes of interactions [167, 111, 55]. For example, humans and robots can be collaborators in factories, while automated vehicles and vehicles driven by human drivers are competitors for limited road resources on public roads. Different modes of interactions imply different system dynamics as well as diverse performance requirements for the robot. Moreover, the relationship that a robot builds with a human may be dynamic, i.e., the mode of interaction may change over time. A unified model for various HRI applications is needed in order to provide a comprehensive understanding of HRI, guide the design of the robot behavior, and serve as an analytical framework for performance evaluation of the human-robot systems.
Design of the robot behaviors
Behavior is the way in which one acts or conducts oneself, especially towards others. Action can be taken in multiple ways. For a humanoid robot, it can be physical movement, gesture, facial expression, language, etc. For an automated vehicle, it can be physical movements, turning on lights, honking, etc. We study the methodology of behavior design, i.e., how to realize the design goal (to ensure that co-robots operate efficiently and safely in dynamic uncertain environments) within the design scope (the inputs and outputs of the robotic system). This book mainly considers physical movements of co-robots.
Software embodiment of the behavior and its computation efficiency
The designed behavior is embodied as robot software. The complexity of the software will increase dramatically when the environment or the task becomes more complex. To ensure timely responses to environmental changes and guarantee safety during operation, real-time computation and actuation is crucial. Efficient algorithms are highly demanded.
Analysis, synthesis and evaluation of complex human-robot systems
The effectiveness of the designed robot behavior needs to be evaluated in human-robot systems. The evaluation can be performed theoretically as well as experimentally. The challenge in theoretical analysis is the complication of interweaving software modules. The difficulty in conducting experiments is that the tolerance of failure is extremely low when human subjects are in the loop, i.e., human safety is critical. Moreover, it is difficult to repeat some human-in-the-loop experiments due to the stochasticity of human behaviors. It is important to develop effective evaluation platforms for human-robot systems.
The focus of this book is to (1) set up a unified analytical framework for various human-robot systems; (2) establish methodologies to design robot behaviors under the framework that address the fundamental question. The considerations in the above four aspects will be elaborated in the following sections.
1.2 MODES OF INTERACTIONS
Interaction between a human and a robot may have various modes. We divide it into two kinds of relationships: parallel relationships and hierarchical relationships.
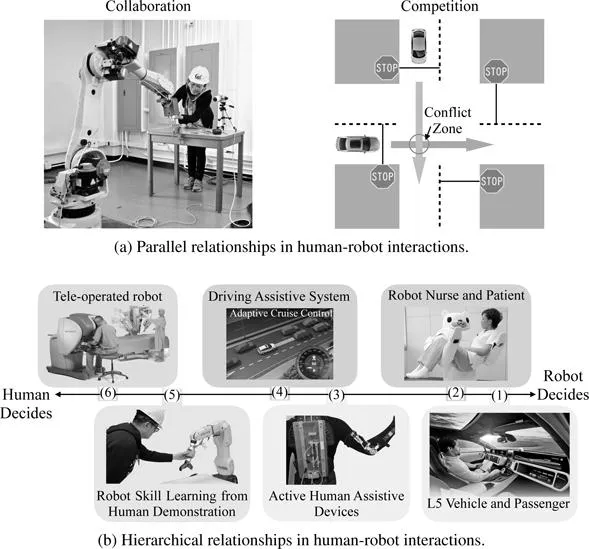
Figure 1.1: Various modes of human-robot interactions.
Color version at the end of the book
In a parallel relationship, a human and a robot are two independent entities who make their own decisions. In literature, parallel interaction is also called peer-peer interaction [55]. Typical examples of parallel relationships are (1) the interaction between an automated vehicle and a human-driven vehicle and (2) the interaction between an industrial co-robot and a human worker in production lines. In either case, the robot (the automated vehicle or the industrial co-robot) and the human (the human-driven vehicle or the human worker) are peers as opposed to hierarchical relationships. In the parallel relationships shown in Fig. 1.1a, the actions of the human and the robot either need to be synchronized (e.g., when the human and the robot are moving one workpiece cooperatively) or need to be asynchronized (e.g., two vehicles cannot occupy the conflict zone at the same time when they are crossing an intersection). We call the synchronized actions collaboration and the asynchronized actions competition (since there will always be a vehicle that passes the conflict zone first). Competition is the most common interaction mode. For instance, if a human and a robot are competing for space, the competition can be understood as collision avoidance.
In hierarchical relationships, either the human or the robot transfers the responsibility of making decisions to the other, completely or partially. Typical examples in hierarchical relationships are listed below, which is also shown in Fig. 1.1b.
1. The interaction between an automated vehicle and a passenger inside a vehicle, where the human passenger allows the vehicle to make driving decisions.1
2. The interaction between a robot nurse and a patient, where the robot decides the moving trajectory for the patient.2
3. The interaction between a human and a human-assistive device such...