- 544 pages
- English
- ePUB (mobile friendly)
- Available on iOS & Android
eBook - ePub
About this book
impossible to access. It has been widely scattered in papers, reports, and proceedings ofsymposia, with different authors employing different symbols and terms. But now thereis a book that covers all aspects of this dynamic topic in a systematic manner.Featuring consistent terminology and compatible notation, and emphasizing unifiedstrategies, Adaptive Control Systems provides a comprehensive, integrated accountof basic concepts, analytical tools, algorithms, and a wide variety of application trendsand techniques.Adaptive Control Systems deals not only with the two principal approachesmodelreference adaptive control and self-tuning regulators-but also considers otheradaptive strategies involving variable structure systems, reduced order schemes, predictivecontrol, fuzzy logic, and more. In addition, it highlights a large number of practical applicationsin a range of fields from electrical to biomedical and aerospace engineering ...and includes coverage of industrial robots.The book identifies current trends in the development of adaptive control systems ...delineates areas for further research . : . and provides an invaluable bibliography of over1,200 references to the literature.The first authoritative reference in this important area of work, Adaptive ControlSystems is an essential information source for electrical and electronics, R&D,chemical, mechanical, aerospace, biomedical, metallurgical, marine, transportation, andpower plant engineers. It is also useful as a text in professional society seminars and inhousetraining programs for personnel involved with the control of complex systems, andfor graduate students engaged in the study of adaptive control systems.
Trusted by 375,005 students
Access to over 1.5 million titles for a fair monthly price.
Study more efficiently using our study tools.
Information
1
Motivation, Definitions, and Classification
There is beginning before the beginning, as preparation of the wick in the morning for the evening Pradeep (lamp).
Rabindranath Tagore
1.1 INTRODUCTION
Adaptive control is an important area of modern control, dealing as it does with the control of systems in the presence of uncertainties, structural perturbations, and environmental variations. There has been a recent upsurge of interest in this field, since adaptive controllers can be implemented simply because of the availability of increasingly versatile digital hardware. Adaptive control techniques have also benefited from the steady and even spectacular reduction in the cost/performance ratio of microelectronic devices in recent years. This has resulted in a wide variety of industrial applications in situations which were not considered easily implementable earlier. Furthermore, many theoretical problems that had baffled researchers have also been solved during the past few years. There have been major advances in the design of adaptive control systems, especially in terms of global stability. Several adaptive control strategies have been successfully applied in diverse practical problems. Adaptive control’s time has come!
The growth of interest in adaptive control is shown in Fig. 1.1, which indicates the dramatic increase in interest during the past few years. Adaptive control techniques have great potential, as only these methods can cope with increasingly complex systems in the presence of extreme changes in system parameters and input signals.
In the succeeding chapters a unified presentation is given of the various aspects of adaptive control. Because the field of adaptive systems is of great breadth and depth, it is possible to cover only a selected set of topics. However, a comprehensive overview of the entire field is given, including recent trends in theory and applications, so that the reader will readily recognize that this is a discipline of considerable theoretical elegance, challenging practical problems, and significant promise.
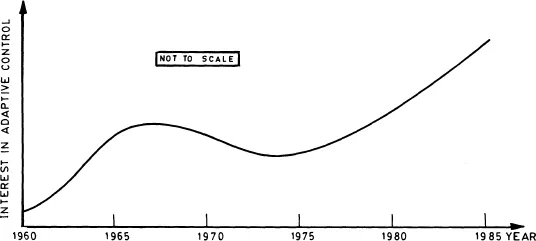
FIG. 1.1 Growth of interest in adaptive control.
The present chapter is organized as follows: Section 1.1 deals with some important landmarks, some early work, and the surveys, bibliographies, and books that have come out on this subject. Section 1.2 considers the important questions regarding why adaptive control is to be used, while at the same time emphasizing the need for probing whether conventional control schemes can be applied to solve the problem involved satisfactorily. Several proposed definitions are included in Section 1.3, even though it is realized that there is, at present, no universally acceptable definition. Essential aspects of adaptive control are discussed in Section 1.4. Section 1.5 considers different classifications of adaptive control schemes and introduces the two main approaches: model-reference adaptive control systems and self-tuning regulators. Concluding remarks are given in Section 1.6.
1.1.1 Some Important Landmarks
Adaptive control was first proposed by Draper and Li [1] as far back as 1951. They dealt with a control system which could optimize the performance of an internal combustion engine in the presence of uncertainties in the performance characteristics. This type of control, which automatically searches for an optimal operating point, is designated as an optimalizing control or sometimes a peak-holding control. Their further work was reported in 1955 [2]. The term adaptive was used in the control literature in 1954, when Tsien [3] described Ashby’s [4] model of the human brain. In 1955 Benner and Drenick [5] presented a control system with “adaptive” characteristics.
The next major step in adaptive control was taken by Whitaker et al. [6] in 1958 when they considered adaptive aircraft flight control systems, employing a reference model to obtain error signals between the actual and desired behavior. These error signals were used to modify the controller parameters to attain ideal behavior to the extent possible in spite of uncertain and varying system dynamics. Such systems are referred to as model reference adaptive control systems (MRAC systems). Their further work was reported in Refs. 7, 8, 9.
Li and van der Velde [10] in 1960 considered another type of adaptive control system, based on the automatic compensation of parameter uncertainties introduced by a limit cycle in the control loop. Such a system is called a self-oscillating adaptive system.
Petrov et al. [11] introduced another approach in 1963 for adaptive system design based on the invariance of the system trajectory in relation to parameter values when the control input is generated from a switching function and relay. Such systems are termed variable structure systems.
Bellman [12] in the United States and Fel’dbaum [13] in the USSR reported in 1960–1961 on the application of dynamic programming concepts in the design of controllers for systems with probabilistic uncertainties.
The interesting dual property of control inputs as identification (parameter estimation) signals and actuation (control) signals led to the term dual control.
Lainiotis [14] introduced the partitioning approach to adaptive control in 1971. Partitioned adaptive controls are shown [15] to have several interesting properties as well as a completely decoupled parallel-processing structure that is computationally attractive and robust.
Astrom and Wittenmark [16] were responsible for the development of another important form of adaptive control, self-tuning regulators (STR), which are relatively easy to implement in view of the availability of microprocessors. This seminal work led to a great upsurge of interest throughout the world in developing new versions of STRs and exploring a variety of applications, even in situations earlier thought to be very difficult. It is probably pertinent to say that applications based on self-tuning regulators have now outnumbered those based on other methods.
Another important breakthrough came in 1974 when Monopoli [17] introduced the augmented error approach to the design of stable MRAC systems. This led to a considerable amount of research in developing adaptive algorithms for globally asymptotically stable systems and resulted in 1980 in several important papers by Narendra et al. [18, 19, 20], Morse [21], Goodwin et al. [22], and Egardt [23,24], both for continuous-time and discrete-time adaptive systems. Not only has there been a resolution of the longstanding problem of stability, but also a unification of different approaches to adaptive control and a realization of the equivalence of MRAC systems and STR.
Adaptive control has now reached a considerable degree of maturity with respect to significant theoretical and algorithmic advances, and adaptive control systems have important current and potential applications.
1.1.2 Some Early Work
An important symposium was held as far back as 1959 at the Wright Air Development Center (WADC), Dayton, Ohio, on self-adaptive flight control systems [25]. During this symposium, many interesting ideas were suggested and these formed the basis for later work on model reference adaptive control [MRAC]. Even the concept involving identification followed by adaptive control action was indicated, and this ultimately led to the introduction of self-tuning regulators.
Although there has been a tremendous outpuring of papers on various aspects of adaptive control in recent years, it is interesting to note some of the early papers [26, 27, 28, 29, 30, 31, 32, 33, 34, 35, 36, 37, 38, 39, 40, 41, 42, 43, 44, 45, 46, 47, 48, 49, 50, 51, 52, 53, 54] published 25 years ago. Similarly, among the large number of doctoral dissertations all over the world, some of the early ones are represented by Refs. 55, 56, 57, 58, 59, 60, 61, 62, 63, 64, 65.
The early adaptive schemes were not implementable with the then available hardware. Further, many of the proposed systems were not properly understood, as theory had not kept p...
Table of contents
- Cover
- Half Title
- Title Page
- Copyright Page
- Dedication
- Table of Contents
- Preface
- 1 MOTIVATION, DEFINITIONS AND CLASSIFICATION
- 2 MODEL REFERENCE ADAPTIVE SYSTEMS
- 3 CONTINUOUS-TIME MRAC SYSTEMS
- 4 DISCRETE-TIME MRAC SYSTEMS
- 5 SELF-TUNING REGULATORS
- 6 MULTIVARIABLE SELF-TUNING REGULATORS
- 7 OTHER ADAPTIVE CONTROL STRATEGIES
- 8 RECENT TRENDS IN ADAPTIVE CONTROL THEORY
- 9 RECENT TRENDS IN ADAPTIVE CONTROL APPLICATIONS
- 10 FUTURE OF ADAPTIVE CONTROL
- Appendix I: Software Packages
- Appendix II: Additional Bibliography
- Index
Frequently asked questions
Yes, you can cancel anytime from the Subscription tab in your account settings on the Perlego website. Your subscription will stay active until the end of your current billing period. Learn how to cancel your subscription
No, books cannot be downloaded as external files, such as PDFs, for use outside of Perlego. However, you can download books within the Perlego app for offline reading on mobile or tablet. Learn how to download books offline
Perlego offers two plans: Essential and Complete
- Essential is ideal for learners and professionals who enjoy exploring a wide range of subjects. Access the Essential Library with 800,000+ trusted titles and best-sellers across business, personal growth, and the humanities. Includes unlimited reading time and Standard Read Aloud voice.
- Complete: Perfect for advanced learners and researchers needing full, unrestricted access. Unlock 1.5M+ books across hundreds of subjects, including academic and specialized titles. The Complete Plan also includes advanced features like Premium Read Aloud and Research Assistant.
We are an online textbook subscription service, where you can get access to an entire online library for less than the price of a single book per month. With over 1.5 million books across 990+ topics, we’ve got you covered! Learn about our mission
Look out for the read-aloud symbol on your next book to see if you can listen to it. The read-aloud tool reads text aloud for you, highlighting the text as it is being read. You can pause it, speed it up and slow it down. Learn more about Read Aloud
Yes! You can use the Perlego app on both iOS and Android devices to read anytime, anywhere — even offline. Perfect for commutes or when you’re on the go.
Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app
Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app
Yes, you can access Adaptive Control Systems by Y.Y. Chalam,Chalam in PDF and/or ePUB format. We have over 1.5 million books available in our catalogue for you to explore.