Architecture and Adaptation discusses architectural projects that use computational technology to adapt to changing conditions and human needs. Topics include kinetic and transformable structures, digitally driven building parts, interactive installations, intelligent environments, early precedents and their historical context, socio-cultural aspects of adaptive architecture, the history and theory of artificial life, the theory of human-computer interaction, tangible computing, and the social studies of technology. Author Socrates Yiannoudes proposes tools and frameworks for researchers to evaluate examples and tendencies in adaptive architecture. Illustrated with more than 50 black and white images.
- 232 pages
- English
- ePUB (mobile friendly)
- Available on iOS & Android
eBook - ePub
About this book
Trusted by 375,005 students
Access to over 1 million titles for a fair monthly price.
Study more efficiently using our study tools.
Information
Topic
ArchitectureSubtopic
Architecture General1
Architecture, Adaptation and the Cybernetic Paradigm
Reyner Banham, Cedric Price, Yona Friedman, Nicholas Negroponte, the members of the Archigram group, as well as the Greek architect Takis Zenetos, were interested in the application of cybernetics in the built environment, as either a conceptual tool or literal technology. They employed cybernetic concepts, like indeterminacy, information feedback, self-regulation and adaptation, in their designs and writings, to envision open-ended user-driven environments. Although their projects were mostly unrealized experiments, similar ideas re-emerged in the 1990s, when the ubiquity of digital devices brought forth, once again, the possibility to synthesize architecture with computer systems, in order to make spaces adaptable to changing needs. This synthesis is what the term adaptation, in the title of the book, refers to, and, as we will explain later, is distinguished from the architectural concepts of flexibility and adaptability. Therefore, the term adaptation takes another connotation, derived from biology and cybernetics; it pertains to the function of adaptive systems, namely the capacity of systems to change and improve their performance, by adjusting their configuration and operations in response to environmental information feedback.
Cybernetics – The Cultural and Scientific Context
Towards a New Kind of Machine
In his 1947 lecture “Machine et Organisme” (first published in 1952),1 the French philosopher and historian of science Georges Canguilhem argued for a reversal of the mechanistic philosophy and biology, which explained organisms in terms of mechanistic principles. Instead he put forth a biological understanding of technology and machines, and located his view in the anthropological interpretation of technology, which regarded tools and machines as extensions of human organs, and owed a lot to ethnographic studies, and the work of anthropologist André Leroi-Gourhan.2 Thus, Canguilhem attempted to explain the construction of machines in different terms than just being the result and application of scientific activity and theorems, or even the processes of industrialization in the capitalist economy. He proposed an understanding of machines by making reference to the structure and functions of organisms, which, unlike the quantifiable, predictable, calculated and periodical movements of mechanical systems, are characterized by self-regulation, auto-maintenance, reproduction, polyvalence and openness to potentiality. Canguilhem traced this view in a new emerging discipline in the US at the time, called “bionics.”3
These ideas anticipated a research agenda put forth by the new science of cybernetics, founded by Norbert Wiener in the 1940s. A year after Canguilhem’s lecture, Wiener defined cybernetics as the “science of control and communication in the animal and the machine, organisms and mechanisms.”4 In his book The Human Use of Human Beings, he discussed the idea of information feedback and self-regulation as the bases for understanding biological, machinic and social processes. Thus, Wiener suggested that it would be possible to create a new kind of machine, namely an environmentally responsive machine that would put the principles of the living to work in the world of the non-living.5
Until the mid-20th century, scientists considered the idea of constructing machines that are more complex than man to be a mere dream or a cultural fantasy. But in the 1940s and 1950s many scientists started to think of novel ways to examine the complexity of intelligent behavior in men, animals and machines, as well as the transmission and reception of messages within a feedback system, either biological or technological. Synthesizing information theory, communication theory and the theory of machine control, they established cybernetics and formulated its basic principles in the so-called Macy conferences. Mathematicians, physiologists and engineers, such as Norbert Wiener, John von Neumann, Claude Shannon, Warren McCulloch, Margaret Mead, Gregory Bateson and others, met in these events from 1942 until 1954, to discuss their work and its interdisciplinary applications. Cybernetics marked the start of an intellectual revolution out of which scientific fields such as cognitive science and artificial intelligence emerged, as well as widespread technologies, such as the information and communication networks that organize the infrastructure of the post-industrial world.
The proponents of cybernetics talked about machines in terms of living organisms and about living organisms in terms of machines. Moreover, most of the electromechanical devices that they constructed to demonstrate the principles of cybernetics in action, manifested an apparent intelligent and adaptive behavior, analogous to living organisms. Ross Ashby re-contextualized cybernetics, not only within information theory, but also within dynamical systems theory, arguing that cybernetics constituted a theory of every possible machine. It was a framework within which all machines, constructed either by man or nature, could be classified according to what they can do and how they can possibly function, and not what they are. Thus, the aim of cyberneticists was to bridge, ontologically, the gap between the organic and the inorganic, the natural and the artificial, organisms and technical objects, acknowledging the difference in the complexity that comes in their respective organization. They proposed, not a model or a simulation of living organisms, but a new kind of machine, which would transcend the opposition between the two poles. In this context, the complexity of life would not be attributed to some untold secret power, as in vitalism, nor would it be reduced to a determinist, linear, mechanical causality, as in mechanistic philosophy and the Cartesian conceptualization of animals as complex machines.6 Transcending the debate about the difference between living organisms and machines beyond vitalistic terms, Wiener suggested that their equation, from a cybernetics standpoint, would arise from the fact that both entities could be regarded as self-regulating machines, able to control (or better reduce) entropy through feedback; that is, the capacity to regulate future behavior from previous operations and eventually learn from their experience. These machines had actuators to perform specific tasks, and sensors that allowed them to record external conditions as much as their own operation, and return this information as input for their next action in a continuous self-regulatory circuit.7
Self-regulation characterized the systems of the first cybernetic wave (1945–1960). It was a property of “homeostasis” – physiologist Walter Cannon coined the term in 1929 – namely the ability of animal bodies to maintain a stable energy status, and to minimize energy loss in relation to environmental changes. Respectively, cyberneticists considered the homeostatic cybernetic model to be able to minimize information loss in the system, in favor of control and stability, through “negative feedback.” A homeostatic machine would resist the tendency towards disorder, due to environmental disturbances, i.e. “noise,” eliminating possible unexpected behaviors and state changes (Figure 1.1). Such a system would be predictable, because it would use feedback loops to constantly follow its target, and maintain the stability of its state of operation, correcting all possible destabilizing activities.
Homeostasis and Architecture
In 1972, Charles Eastman suggested that architecture could be conceived as a feedback system self-adjusting space to fit user needs in a dynamic stability, such as that of a boat constantly correcting its course against environmental disturbances.8 Similarly, in 1975 Nicholas Negroponte, discussing machine controlled environments, regarded greenhouses with opening–closing glass roofs as examples of homeostatic buildings, i.e. buildings working as thermostat mechanisms, able to control, decode, interpret and encode information about the comfort level of plants.9 Michael Fox recently described such a system for kinetic architectural structures, through a diagram of what he called “responsive indirect control”; a central computer program receives environmental sensor input and sends an optimal instruction through regulatory feedback to actuators to move a single architectonic element.10
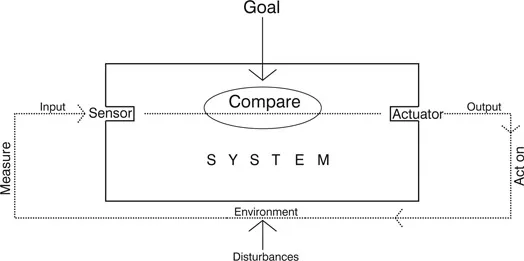
Figure 1.1 First-order cybernetic system
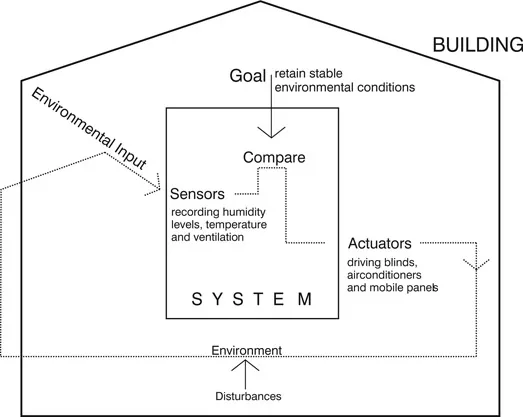
Figure 1.2 Homeostatic system in buildings
Thus, a homeostatic system in buildings would be able to constantly adjust the state of the internal environment through feedback, according to the given needs of its inhabitants or the overall goals of the system (Figure 1.2). For instance, it would include environmentally responsive building skins, capable of regulating and correcting their transparency and permeability (by means of kinetic blinds or mobile roof panels) through a closed feedback loop, registering environmental information (sunlight intensity, humidity levels, wind speed) towards a predetermined goal (for instance stable light intensity). A homeostatic architecture, however, would involve predictable behaviors functioning towards constant elimination of unwanted “disturbances.” Thus, it would only work in a context where environmental fluctuations and operational changes are predefined and known in advance.
This is well illustrated in an early experimental project built by Nicholas Negroponte and MIT’s Architecture Machine Group, called SEEK (aka Blocksworld), which took issue with both first-order and, as we will see in a moment, second-order cybernetics. SEEK was a computer-controlled installation originally shown at the “Software” exhibition at the Jewish Museum in New York 1970, curated by Jack Burnham. The installation consisted of 500 two-inch metal cubes on a rectilinear three-dimensional arrangement within a plexiglas box populated by a number of gerbils, constantly relocating the cubes and changing the overall set-up. As a response to these “disturbing” actions, a gantry-type robotic arm with an electromagnetic end-effector (fed by a video camera that registered the changes), would constantly rearrange the cubes; those that were slightly dislocated would be realigned according to the computational model of the set-up – the programmed three-dimensional configuration stored in its computer memory. But if the cubes were significantly dislocated by the gerbils, the system would move them in their new place on the assumption that the gerbils “wanted” them there.11
SEEK was an experiment in the symbiotic relationship between living organisms and machines, as well as an exploration into the capacity of the machine to deal with the mismatch between its computational model of the structure and its real-world configuration. More importantly, considered as a model of urban and architectural design, the overall set-up would be either reconstructed back to its initial model or to a novel configuration. If the gerbils’ erratic and unpredictable behavior is the analogue of the system’s “noise” that the negative feedback eliminates through “corrective” operations (redistribution of the cubes by mechanical means), then the project can be regarded as a model of a first-order cybernetics approa...
Table of contents
- Cover
- Title
- Copyright
- CONTENTS
- List of Figures
- Foreword
- Preface
- Introduction
- 1 Architecture, Adaptation and the Cybernetic Paradigm
- 2 Intelligence in Architectural Environments
- 3 Psycho-Social Aspects
- 4 Contextualizing Interactive Architecture
- 5 Tangible Computing: Towards Open-Potential Environments
- Bibliography
- Index
Frequently asked questions
Yes, you can cancel anytime from the Subscription tab in your account settings on the Perlego website. Your subscription will stay active until the end of your current billing period. Learn how to cancel your subscription
No, books cannot be downloaded as external files, such as PDFs, for use outside of Perlego. However, you can download books within the Perlego app for offline reading on mobile or tablet. Learn how to download books offline
Perlego offers two plans: Essential and Complete
- Essential is ideal for learners and professionals who enjoy exploring a wide range of subjects. Access the Essential Library with 800,000+ trusted titles and best-sellers across business, personal growth, and the humanities. Includes unlimited reading time and Standard Read Aloud voice.
- Complete: Perfect for advanced learners and researchers needing full, unrestricted access. Unlock 1.4M+ books across hundreds of subjects, including academic and specialized titles. The Complete Plan also includes advanced features like Premium Read Aloud and Research Assistant.
We are an online textbook subscription service, where you can get access to an entire online library for less than the price of a single book per month. With over 1 million books across 990+ topics, we’ve got you covered! Learn about our mission
Look out for the read-aloud symbol on your next book to see if you can listen to it. The read-aloud tool reads text aloud for you, highlighting the text as it is being read. You can pause it, speed it up and slow it down. Learn more about Read Aloud
Yes! You can use the Perlego app on both iOS and Android devices to read anytime, anywhere — even offline. Perfect for commutes or when you’re on the go.
Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app
Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app
Yes, you can access Architecture and Adaptation by Socrates Yiannoudes in PDF and/or ePUB format, as well as other popular books in Architecture & Architecture General. We have over one million books available in our catalogue for you to explore.