- 240 pages
- English
- ePUB (mobile friendly)
- Available on iOS & Android
eBook - ePub
Adaptive Filtering Primer with MATLAB
About this book
Because of the wide use of adaptive filtering in digital signal processing and, because most of the modern electronic devices include some type of an adaptive filter, a text that brings forth the fundamentals of this field was necessary. The material and the principles presented in this book are easily accessible to engineers, scientists, and students who would like to learn the fundamentals of this field and have a background at the bachelor level.
Adaptive Filtering Primer with MATLAB® clearly explains the fundamentals of adaptive filtering supported by numerous examples and computer simulations. The authors introduce discrete-time signal processing, random variables and stochastic processes, the Wiener filter, properties of the error surface, the steepest descent method, and the least mean square (LMS) algorithm. They also supply many MATLAB® functions and m-files along with computer experiments to illustrate how to apply the concepts to real-world problems. The book includes problems along with hints, suggestions, and solutions for solving them. An appendix on matrix computations completes the self-contained coverage.
With applications across a wide range of areas, including radar, communications, control, medical instrumentation, and seismology, Adaptive Filtering Primer with MATLAB® is an ideal companion for quick reference and a perfect, concise introduction to the field.
Trusted by 375,005 students
Access to over 1.5 million titles for a fair monthly price.
Study more efficiently using our study tools.
Information
chapter 1
Introduction
1.1 Signal processing
In numerous applications of signal processing and communications we are faced with the necessity to remove noise and distortion from the signals. These phenomena are due to time-varying physical processes, which sometimes are unknown. One of these situations is during the transmission of a signal (message) from one point to another. The medium (wires, fibers, microwave beam, etc.), which is known as the channel, introduces noise and distortion due to the variations of its properties. These variations may be slow varying or fast varying. Since most of the time the variations are unknown, it is the use of adaptive filtering that diminishes and sometimes completely eliminates the signal distortion.
The most common adaptive filters, which are used during the adaptation process, are the finite impulse response filters (FIR) types. These are preferable because they are stable, and no special adjustments are needed for their implementation.
The adaptation approaches, which we will introduce in this book, are: the Wiener approach, the least-mean-square algorithm (LMS), and the least-squares (LS) approach.
1.2 An example
One of the problems that arises in several applications is the identification of a system or, equivalently, finding its input-output response relationship. To succeed in determining the filter coefficients that represent a model of the unknown system, we set a system configuration as shown in Figure 1.2.1.
The input signal, {x(n)}, to the unknown system is the same as the one entering the adaptive filter. The output of the unknown system is the desired signal, {d(n)}. From the analysis of linear time-invariant systems (LTI), we know that the output of linear time-invariant systems is the convolution of their input and their impulse response.
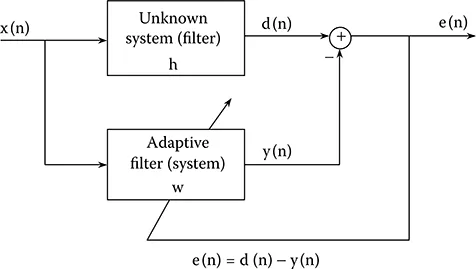
Figure 1.2.1 System identification.
Let us assume that the unknown system is time invariant, which indicates that the coefficients of its impulse response are constants and of finite extent (FIR). Hence, we write
The output of an adaptive FIR filter with the same number of coefficients, N, is given by
For these two systems to be equal, the difference e(n) = d(n) − y(n) must be equal to zero. Under these conditions the two sets of coefficients are equal. It is the method of adaptive filtering that will enable us to produce an error, e(n), approximately equal to zero and, therefore, will identify that wk’s ≅ hk’s.
1.3 Outline of the text
Our purpose in this text is to present the fundamental aspects of adaptive filtering and to give the reader the understanding of how an algorithm, LMS, works for different types of applications. These applications include system identification, noise reduction, echo cancellation during telephone conversation, inverse system modeling, interference canceling, equalization, spectrum estimation, and prediction. In order to aid the reader in his or her understanding of the material presented in this book, an extensive number of MATLAB functions were introduced. These functions are identified with the words “Book MATLAB Function.” Ample numbers of examples and figures are added in the text to facilitate the understanding of this particular important signal processing technique. At the end of each chapter, except this introductory chapter, we provided many problems and either complete solutions or hints and suggestions for solving them.
We have tried to provide all the needed background for understanding the idea of adaptive filters and their uses in practical applications. Writing the text, we assumed that the reader will have knowledge at the level of a bachelor’s degree in electrical engineering. Although only a small amount of new results is included in this text, its utility of the presented material should be judged by the form of presentation and the successful transferring of the fundamental ideas of adaptive filtering and their use in different areas of research and development.
To accomplish the above mentioned goals, we have started introducing digital signals and their representation in the frequency domain and z-transform domain in Chapter 2. Next, we present in block diagram form the three fundamental discrete systems: finite impulse response (FIR), infinite impulse response (IIR), and the combined system known as the autoregressive mean average (ARMA).
Since most of the input signals in applications of adaptive filtering are random signals, we introduce the notion of random variables, random sequences, and stochastic processes in Chapter 3. Furthermore, we introduce the concepts, and the approaches of finding the power spectral density of random signals.
Chapter 4 develops the foundation for determining minimum mean-square error (MSE) filters. The chapter introduces the Wiener filter, and the “bowl-shaped” error surface. The Wiener filter is also used in a special configuration named self-correcting filtering.
Since the magnitude of the difference between the maximum and minimum value of the eigenvalues of the correlation matrix plays an important role in the rate of convergence of adaptation, Chapter 5 introduces the theory and properties of the eigenvalues and the properties of the error surface.
Chapter 6 introduces the following two gradient search methods: the Newton method and the steepest descent method. A derivation of the convergence properties of the steepest descent method is presented, as well as the valuable geometric analogy of finding the minimum point of the “bowl-shaped” error surface.
Chapter 7 introduces the most celebrated algorithm of adaptive filtering, the LMS algorithm. The LMS algorithm approximates the method of steepest descent. In addition, many examples are presented using the algorithm in diverse applications, such as communications, noise reduction, system identification, etc.
Chapter 8 presents a number of variants of the LMS algorithm, which have been developed since the introduction of the LMS algorithm.
The last chapter, Chapter 9, covers the least squares and recursive least squares signal processing.
Finally, an Appendix was added to present elements of matrix analysis.
chapter 2
Discrete-time signal processing
2.1 Discrete-time signals
Discrete-time signals are seldom found in nature. Therefore, in almost all cases, we will be...
Table of contents
- Cover Page
- Half title
- Title Page
- Copyright page
- Dedication
- Preface
- Authors
- Contents
- Chapter 1 Introduction
- Chapter 2 Discrete-time signal processing
- Chapter 3 Random variables, sequences, and stochastic processes
- Chapter 4 Wiener filters
- Chapter 5 Eigenvalues of Rx — properties of the error surface
- Chapter 6 Newton and steepest-descent method
- Chapter 7 The least mean-square (LMS) algorithm
- Chapter 8 Variations of LMS algorithms
- Chapter 9 Least squares and recursive least-squares signal processing
- Abbreviations
- Bibliography
- Appendix — Matrix analysis
- Index
Frequently asked questions
Yes, you can cancel anytime from the Subscription tab in your account settings on the Perlego website. Your subscription will stay active until the end of your current billing period. Learn how to cancel your subscription
No, books cannot be downloaded as external files, such as PDFs, for use outside of Perlego. However, you can download books within the Perlego app for offline reading on mobile or tablet. Learn how to download books offline
Perlego offers two plans: Essential and Complete
- Essential is ideal for learners and professionals who enjoy exploring a wide range of subjects. Access the Essential Library with 800,000+ trusted titles and best-sellers across business, personal growth, and the humanities. Includes unlimited reading time and Standard Read Aloud voice.
- Complete: Perfect for advanced learners and researchers needing full, unrestricted access. Unlock 1.5M+ books across hundreds of subjects, including academic and specialized titles. The Complete Plan also includes advanced features like Premium Read Aloud and Research Assistant.
We are an online textbook subscription service, where you can get access to an entire online library for less than the price of a single book per month. With over 1.5 million books across 990+ topics, we’ve got you covered! Learn about our mission
Look out for the read-aloud symbol on your next book to see if you can listen to it. The read-aloud tool reads text aloud for you, highlighting the text as it is being read. You can pause it, speed it up and slow it down. Learn more about Read Aloud
Yes! You can use the Perlego app on both iOS and Android devices to read anytime, anywhere — even offline. Perfect for commutes or when you’re on the go.
Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app
Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app
Yes, you can access Adaptive Filtering Primer with MATLAB by Alexander D. Poularikas,Zayed M. Ramadan in PDF and/or ePUB format, as well as other popular books in Technology & Engineering & Probability & Statistics. We have over 1.5 million books available in our catalogue for you to explore.