![]()
I
Theory
![]()
CHAPTER 1
… and then there were mobile robots
“In the 1920s science fiction was becoming a popular art form for the first time …. and one of the stock plots …. was that of the invention of a robot ….Under the influence of the well-known deeds and ultimate fate of Frankenstein and Rossum, there seemed only one change to be rung on this plot — robots were created and destroyed their creator … I quickly grew tired of this dull hundred-times-told tale …. Knowledge has its dangers, yes, but is the response to be a retreat from knowledge? …. I began in 1940, to write robot stories of my own — but robot stories of a new variety …… My robots were machines designed by engineers, not pseudo-men created by blasphemers.”
– Isaac Asimov [367]
1.1 EARLY PIONEERS AND THE STORY TILL SHAKEY
THE wish for automated machines doing chores on human command goes back to the lore of Greek mythology. Homer writes about artificial servants with the ability of thinking, speech, and locomotion for the Gods at Mt. Olympus, which were built by the blacksmith cum craftsman Haphaestus [25].
It is some coincidence that the first evidence of an automaton is also found in ancient Greece at Alexandria, around 250 BC when Philon of Byzantium build a human-like automaton [197] which looked like a maid, holding a jug of wine in her right hand. When a cup was placed in the automaton’s left palm it poured some wine, followed by water to mix in and served a drink. Philon designed his automaton with smart mechanisms and pneumatics and named it Automatiopoeica, which historically is said to be the first robot.
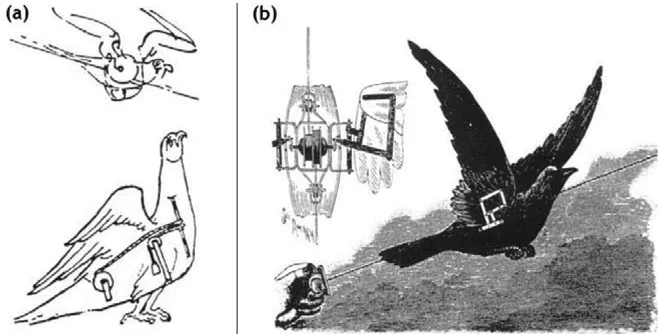
Lion-like automatons are found in the accounts of Byzantine emperor Theophilos around 820, while around medieval times, building automatons in the Muslim world is well documented in the works of Al-Jazari and Banu Musa. From the 11th to 15th century automatons such as horsemen, birds, doors etc. as parts of mechanical clocks were found both in Europe and the Arab world. Near the European renaissance, Da Vinci [283] helped by royal patronage in Italy, developed mechanically maneuverable automatons, shown in Figure 1.1.
FIGURE 1.1 Da Vinci’s Bird. These are sketches for a bird-like automaton; (a) is from Da Vinci’s Codex Atlanticus and (b) is from Codex Huygens. From Rosheim [283], with kind permission from Springer Science and Business Media.
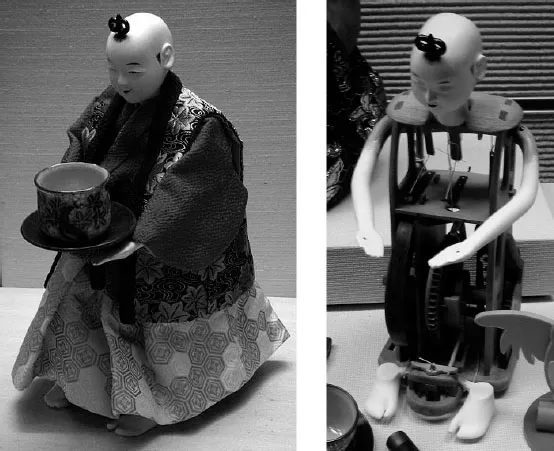
At about the same time across the globe Japan had made its own automaton, the Karakuri Ningyo puppets. These puppets had using mechanical arrangements, where a wound up spring was employed to store energy, This was followed up with a coordination of cams, levers and gears to actuate the puppet. Meant for recreational purposes, as shown in Figure 1.2, it was popularly used as a tea-serving automaton, the puppet can move forward with a cup of tea in its hands and then bow its head to offer tea to the guest, after drinking when the cup is returned by the guest to the puppet, it raises its head in a show of gratitude, turns around and returns.
FIGURE 1.2 Karakuri Puppets. These puppets, made in Japan from the 17th to the 19th century,were triggered by a wound-up spring and could serve tea. Image courtesy en.wikipedia.org.
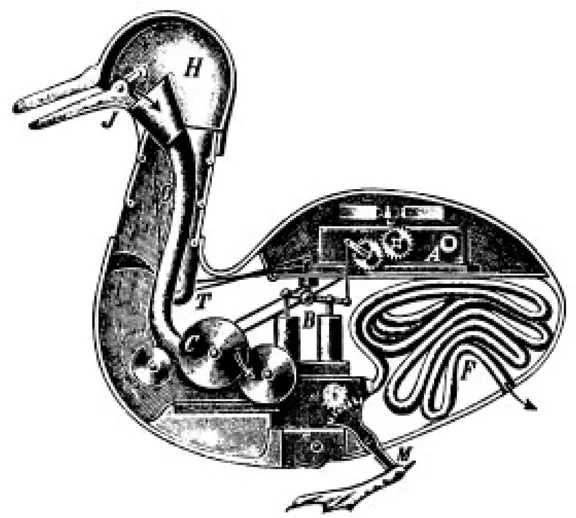
More sophisticated automatons were to follow in the coming century. Vaucanson made his automated duck [368] in 1738 with mechanical arrangements as shown in Figure 1.3. His duck could flap its wings, make quacking noise, drink water, eat grain and seeds with a near realistic gulping action. The duck was designed to be the same size as a living duck, made out of gold-plated copper. Vaucanson also developed other such automatons: the flute player and the tambourine player which were life-size human figures which created an imitation of playing musical instruments and android waiters which would serve food and clear tables.
FIGURE 1.3 Vaucanson’s Duck, made in 1738, is an example of early automaton. Image courtesy en.wikipedia.org.
Around the late 18th century a similar mechanical arrangement was employed in Mysore, India, to build a mechanical wooden tiger which responded to turning a handle with a growl and an animated attack. Various historians have suggested that this may have been an outcome of Tipu Sultan’s collaboration with the French.
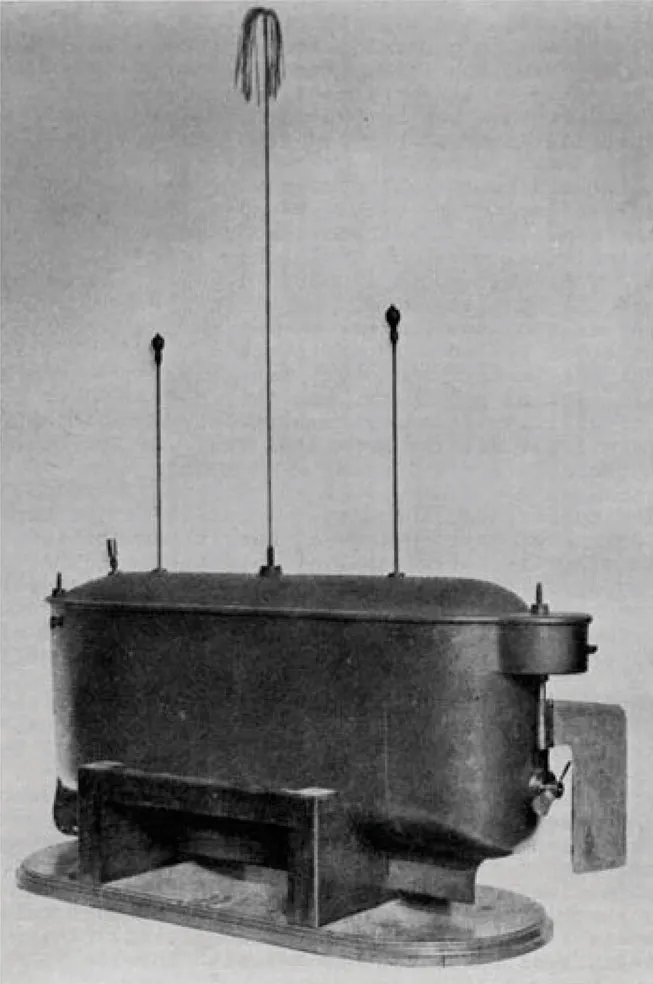
All of these developments took place without any electricity, and were powered either by a smart mechanical arrangement which most of time was a coiled up spring, or by pneumatics and hydraulics. It was not until around 1890 that Tesla used electricity to build miniaturised boats which were controlled remotely using radio signals, as shown in Figure 1.4.
FIGURE 1.4 Tesla’s radio-controlled boat. Nikola Tesla patented a radio-controlled robot-boat in the winter of 1898, and named it ‘teleautomaton’. Tesla demonstrated his invention at Madison Square Garden, New York City, in the Electrical Exhibition that year. Image courtesy commons.wikimedia.org, CC license.
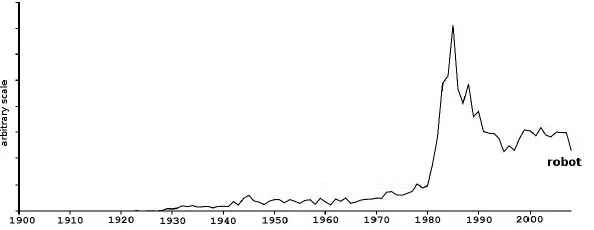
The coining of the word ‘robot’, had to wait until 1920. This etymology is derived from the Czech word ‘robota’ meaning committed labour. It was first used in Karel Čapek’s play, R.U.R — Rossum’s Universal Robots1 The evolution in the usage of the word ‘robot’ is shown in Figure 1.5 and the word cloud from Wikipedia associating it with other words and ideas is shown in Figure 1.6.
FIGURE 1.5 Use of the word ‘robot’.Considering 1950 as a base year, around 1985 the usage of the word ‘robot’ saw an increase of about 12-fold, after the 1990s there has been a decline in usage due to development of nomenclature such as ‘roomba’, which has become a tag name for all cleaning robots, ‘PUMA’ and its variants which have ruled the arm robots domain, ‘drones’ to connote all flying robots, and newer science fiction is more about androids and cyborgs, than the simplistic R2D2 and C3P0 of the 1980s. Made using Google Books Ngram Viewer [230]
FIGURE 1.6 Wordcloud of the word ‘robot’ from Wikipedia. Nearly all the words seen here are used in the chapters to follow. Made using the wordsalad app, http://wordsaladapp.com/.
FIGURE 1.7 LUNOKHOD-1, from a Russian lunar mission, is one of the earliest examples of teleoperation and telemanipulation. From Spenneman [308], reprinted by permission of the publisher Taylor & Francis Ltd, (http://www.tandfonline.com.)
The first humanoid robot, Eric was made by W.H. Richards in 1928 and put on display in London. The Westinghouse Electric Company developed another humanoid, Electro around the 1940s which was controlled by electrical relays and could play recorded speech, respond to voice commands and moved on wheels attached to its toes. Claude Shannon in 1938 made the electromechanical mouse, which could find its way to the goal point by trial and error — a humble ancestor of the modern day micromouse.
Despite Tesla’s boat and Shannon’s mouse, in the first half of the last century, robots were still difficult to build because computer technology such as ENIAC relied on bulky and cumbersome electronics of gas valves which were just too big to be integrated into a mobile unit. It was not until 1949 that Walter’s robots [344] heralded in the concept of a mobile computational unit readily interacting with the environment. These robots had likeness to turtles and could perform simples behaviours as following the light and avoid obstacles. Walter had achieved the first bonding of electronics and mechanical modules which could respond to an external stimuli. In the 1950s, Devol designed the Unimate robot arm which was the first programmable industrial arm manipulator.
Later, in the early 1970s, Shakey and the Stanford Cart were early robots developed from principles of autonomous agents and AI. Around the same time, researchers at Waseda University developed a full-scale humanoid, Wabot-1, which had two legs and two arms and could communicate with human beings in Japanese. From a cognitive point of view, the robot had the mental faculty of a 2-year-old kid.
The Russian moon missions led to the development of the Lunokhod programme. The Lunokhod-1, shown in Figure 1.7, was the first robot to land on another heavenly body. The Lunokhod-1 in 1970 and the Lunokhod-2 three years later were remote-controlled robotic vehicles designed to chart the lunar surface. The robot vehicles were equipped with solar panels for power by day and a radioisotope heater unit for power by night. Explorer robots,since Lunokhod have come of age and gone on to explore other planets and heavenly bodies such as comets as shown in Figure 1.8.
FIGURE 1.8 Philae (Toby, 1 of 4.) The robotic lander on Comet 67P came alive [134] with the falling sunlight on its solar panels and reestablished contact with Earth on 13 June 2015. Cartoon made as a part of the Toby series (1 of 4) by the author, CC-by-SA 4.0 license.
With the microelectronics revolution in the 1970s and computer revolution in the 1980s, robotics took a leap with readily available miniaturised components and smaller processing units and user friendly software interfaces.
1.1.1 Walter’s turtles
Modern day mobile robotics was born in 1949, when W.G Walter built 2 three-wheeled automated turtle-like robots [154]. These automated turtles had a light sensor, a touch sensor, a propulsion motor for a front-wheel drive, a steering motor to move around and a vacuum tube analog computer. Walter named his project Machina speculatrix, and he named the 2 turtles after characters in ‘Alice in Wonderland’, Elmer and Elsie, which also fit the suitable acronyms, ELectro MEchanical Robots,Light Sensitive, with Internal and External stability. This was the first electromechanical autonomous mobile robot. These turtles had three characteristics: attraction to moderate light and repulsion by bright light and obstacles. In various experiments, the turtles responded to a number of external stimuli:
1. Goal seeking behaviour. When started in the dark, the turtle made its way towards a beam of light and tracked it to reach its feeding hutch.
2. Free will as in the ability to to choose between alternatives, choosing to reach the nearer of two light sources when executing light tracking behaviour, staying close to it for some time and then moving on to the next light source and then returning back to the former. This cyclic behaviour continues until power runs out.
3. Pertinacity. The turtles showed dogged determination, when tracking a light source if it so happened that the light source was not visible from their field of view due to obstacles, they would resort to moving in a random direction and on finding the source of light they would assume light tracking behaviour. This behaviour is shown in Figure 1.9.
4. Preference for an optimum. The turtles avoided extreme stim...