1.1 General Context
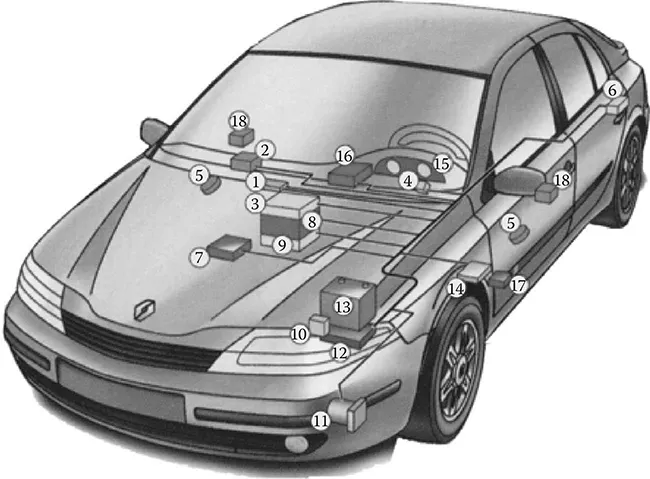
The automotive industry is today the sixth largest economy in the world, producing around 70 million cars every year and making an important contribution to government revenues all around the world [1]. As for other industries, significant improvements in functionalities, performance, comfort, safety, etc. are provided by electronic and software technologies. Indeed, since 1990, the sector of embedded electronics, and more precisely embedded software, has been increasing at an annual rate of 10%. In 2006, the cost of an electronic-embedded system represented at least 25% of the total cost of a car and more than 35% for a high-end model [2]. This cost is equally shared between electronic and software components. These general trends have led to currently embedding up to 500 MB on more than 70 microprocessors [3] connected on communication networks. The following are some of the various examples. Figure 1.1 shows an electronic architecture embedded in a Laguna (source: Renault French carmaker) illustrating several computers interconnected and controlling the engine, the wipers, the lights, the doors, and the suspension or providing a support for interaction with the driver or the passengers. In 2004, the embedded electronic system of a Volkswagen Phaeton was composed of more than 10,000 electrical devices, 61 microprocessors, three controller area networks (CAN) that support the exchanges of 2500 pieces of data, several subnetworks, and one multimedia bus [4]. In the Volvo S70, two networks support the communication between the microprocessors controlling the mirrors, those controlling the doors and those controlling the transmission system and, for example, the position of the mirrors is automatically controlled according to the sense the vehicle is going and the volume of the radio is adjusted to the vehicle speed, information provided, among others, by the antilock braking system (ABS) controller. In a recent Cadillac, when an accident causes an airbag to inflate, its microcontroller emits a signal to the embedded global positioning system (GPS) receiver that then communicates with the cell phone, making it possible to give the vehicle’s position to therescueservice. Thesoftware code size of thePeugeot CX model(source: PSA Peugeot Citroen French carmarker) was 1.1 KB in 1980, and 2 MB for the 607 model in 2000. These are just a few examples, but there are many more that could illustrate this very large growth of embedded electronic systems in modern vehicles.
Figure 1.1 A part of the embedded electronic architecture of a Renault Laguna. (Courtesy of Renault Automobile. With permission.)
The automotive industry has evolved rapidly and will evolve even more rapidly under the influence of several factors such as pressure from state legislation, pressure from customers, and technological progress (hardware and software aspects). Indeed, a great surge for the development of electronic control systems came through the regulation concerning air pollution. But we must also consider the pressure from consumers for more performance (at lower fuel consumption), comfort, and safety. Add to all this the fact that satisfying these needs and obligations is only possible because of technological progress.
Electronic technology has made great strides and nowadays the quality of electronic components—performance, robustness, and reliability—enables using them even for critical systems. At the same time, the decreasing cost of electronic technology allows them to be used to support any function in a car. Furthermore, in the last decade, several automotive-embedded networks such as local interconnect networks (LIN), CAN, TTP/C, FlexRay, MOST, and IDB-1394 were developed. This has led to the concept of multiplexing, whose principal advantage is a significant reduction in the wiring cost as well as the flexibility it gives to designers; data (e.g., vehicle speed) sampled by one microcontroller becomes available to distant functions that need them with no additional sensors or links.
Another technological reason for the increase of automotive embedded systems is the fact that these new hardware and software technologies facilitate the introduction of functions whose development would be costly or not even feasible if using only mechanical or hydraulic technology. Consequently, they allow to satisfy the end user requirements in terms of safety, comfort, and even costs. Well-known examples are electronic engine control, ABS, electronic stability program (ESP), active suspension, etc. In short, thanks to these technologies, customers can buy a safe, efficient, and personalized vehicle, while carmakers are able to master the differentiation between product variations and innovation (analysts have stated that more than 80% of innovation, and therefore of added value, will be obtained thanks to electronic systems [5]). Furthermore, it also has to be noted that some functions can only be achieved through digital systems. The following are some examples: (1) the mastering of air pollution can only be achieved by controlling the engine with complex control laws; (2) new engine concepts could not be implemented without an electronic control; (3) modern stability control systems (e.g., ESP), which are based on close interaction between the engine, steering, and braking controllers, can be efficiently implemented using an embedded network.
Last, multimedia and telematic applications in cars are increasing rapidly due to consumer pressure; a vehicle currently includes electronic equipment like hand-free phones, audio/radio devices, and navigation systems. For the passengers, a lot of entertainment devices, such as video equipment and communication with the outside world are also available. These kinds of applications have little to do with the vehicle’s operation itself; nevertheless they increase significantly as part of the software included in a car.
In short, i...