The field of process control has evolved gradually over the years, with emphasis on key aspects including designing and tuning of controllers. This textbook covers fundamental concepts of basic and multivariable process control, and important monitoring and diagnosis techniques.
It discusses topics including state-space models, Laplace transform to convert state-space models to transfer function models, linearity and linearization, inversion formulae, conversion of output to time domain, stability analysis through partial fraction expansion, and stability analysis using Routh table and Nyquits plots. The text also covers basics of relative gain array, multivariable controller design and model predictive control. The text comprehensively covers minimum variable controller (MVC) and minimum variance benchmark with the help of solved examples for better understanding. Fundamentals of diagnosis of control loop problems are also explained and explanations are bolstered through solved examples. Pedagogical features including solved problems and unsolved exercises are interspersed throughout the text for better understanding.
The textbook is primarily written for senior undergraduate and graduate students in the field of chemical engineering and biochemical engineering for a course on process control.
The textbook will be accompanied by teaching resource such a collection of slides for the course material and a includsolution manual for the instructors.
Trusted by 375,005 students
Access to over 1.5 million titles for a fair monthly price.
1.1Single-Input-Single-Output and Multi-Input-Multi-Output Controllers
1.2Regulatory and Servo Control Problems
1.3Dynamic Behaviour of Processes
1.4Summary
The concept of control is ubiquitous. While one of the early popular engineering control concepts can be found in steam governors for locomotives, control is an inherent part of the hundreds of regulatory biological loops that makes us what we are. Of course, process plants cannot operate without control. In an ideal world, where there are no disturbances, one could conceivably run a plant in the design conditions once stabilized. Even in such a situation, some sort of control is needed if one were to take the plant from one operating state to another. For instance, under ideal conditions, it is desirable to have a controller that is an exact inverse of the process, which will help the process reach different operating states (setpoints) by negating process dynamics. However, this is not practically possible due to the following: an exact inverse of the process is not always obtainable and, disturbances affecting the process will preclude the output from reaching setpoint. The concept of feedback was introduced to address these concerns and the entire control system is usually designed so that the overall closed-loop system (including the controller) is able to achieve the following six objectives: safety (overall process is stable), environment protection (the process output obeys the environment regulations), equipment protection (behaviour of the closed-loop system does not result in damage to the equipment), high production rate, product quality, and profitability. Also, it is important to develop a design that can be easily monitored and diagnosed for faults. However, we will later observe that several of these are competing objectives and result in trade-offs. The field of process control therefore deals with design of control systems for processes that satisfy the aforementioned objectives by following an optimum sloppiness approach.
To start with, let us consider a top down view of process control. Consider a chemical process where the overall objective is to maximize profits while operating the plant within safety and operational constraints. An overall cost function that accounts for profit will include the income from selling all the products produced and subtracting from this, all raw material and utility costs. The utilities are used for running the reactor, heat exchange equipment, separation units, and so on. Let us represent this function by p. This function will depend on several variables; let us name them x1, …, x2. Mathematically, profit = p(x1, x2, …, xn). Now, from an operational viewpoint, this profit needs to be maximized, taking into account safety, environmental, equipment and product quality constraints. These variables will also be constrained by the physics of the process.
Usually this profit function is notionally optimized through heuristic knowledge or through a formal mathematical approach. Heuristic knowledge is usually derived through studying the operations of similar systems and some process insight. A formal mathematical approach would need fundamental first-principles knowledge of the cause-effect behaviours of the various units in the process and a precise statement of the objective function. In real plants, in most cases, a combination of heuristic knowledge and local mathematical optimization is used for optimizing process performance. Nonetheless, whichever approach is used, let us denote the optimized profits as p*, which is achieved at the optimum values for x1, x2, …, xn at x1*, x2*, …, xn*.
Now, a certain number of variables from this set are chosen for control. In some sense, these are a combination of variables that are likely to be safety critical, very sensitive to fluctuations and/or the profit objective is very sensitive to changes in these variables. Let us denote these variables as c1, …, cm and the optimum values that these variables should be maintained at or alternatively the “setpoint” for these variables as c1*, …, cm*. The process of selection of control variables and setpoints for these variables is depicted in Figure 1.1. To control these variables at their desired values, there should be appropriate actuators (input variables) installed in the process.
Figure 1.1: Controlled variables and their “setpoints” selection
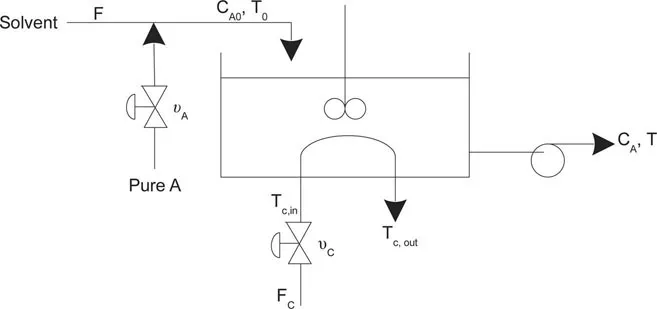
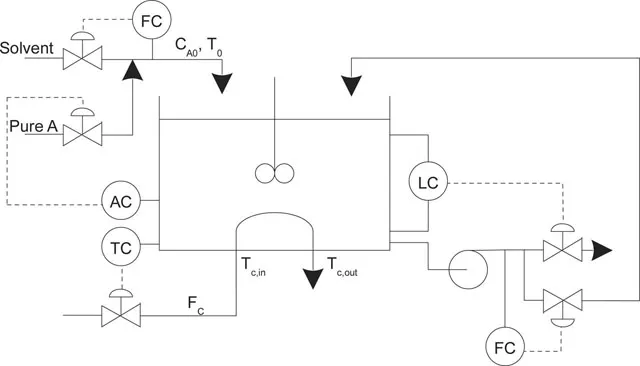
To demonstrate the control variable selection procedure, let us consider a simple Continuous Stirred Tank Reactor (CSTR) with a heat exchange for reaction (shown in Figure 1.2). The reactions proceed from: A → B → C with B as the desired product. Let CA0 be the initial feed concentration with a flowrate F and temperature T0. The coolant temperature at the entry is Tc,in, while it is Tc,out at the reactor exit. The valves vA and vC vary the flowrate of feed and coolant. The concentration and temperature at the exit of the reactor are denoted by CA and T. For this process, one can select a set of manipulated and controlled variables based on the objectives described before. For instance, to maximize profit, it is important to maximize the yield of product B (assuming A → B is the primary reaction) by controlling the reaction temperature. The temperature in the reactor can be manipulated by varying the coolant flow to the reactor using the valve in the coolant pipe. For safety, it might be important to control the liquid-level in the reactor. From Figure 1.3, in order to satisfy various control objectives, we know the available manipulated variables and the chosen controlled variables. Some of the major disturbances that could affect the process are: feed pressure, impurities in the feed, coolant temperature, and so on. A schematic of the control system for this process is shown in Figure 1.3. Here, AC, LC, TC and FC indicate concentration, level, temperature and flow controllers, respectively. The dashed line connected to the valve being manipulated denotes information flow (electronic signal) from the controller to the valve.
Figure 1.2: CSTR with heat exchange for the reaction system
Figure 1.3: A schematic of the control system for CSTR with heat exchange system
1.1Single-Input-Single-Output and Multi-Input-Multi-Output Controllers
The manipulated and controlled variables that participate in the controller are depicted in Figure 1.4. In the figure, the controller chooses values that the manipulated variables need to attain given the setpoints that the controlled variables are expected to follow. One option at this point is to define a controller that manipulates all the variables (m1, …, mr, …, mm) at the same time to ensure that all controlled variables are maintained at their respective setpoints (obtained from optimization of control objectives). Such a controller would be a multivariable controller and recent trend in chemical process industry is to design such controllers. While this seems desirable, ...
Table of contents
Cover
Half Title
Title Page
Copyright Page
Dedication
Contents
Preface
1. Introduction
2. Models for Control
3. Process Identification
4. Analysis of Transfer Function Models
5. Controllers and Analysis of Closed-loop Transfer Functions
6. Controller Tuning
7. MIMO Control Concepts
8. Model Predictive Control
9. Fundamentals of Controller Performance Assessment
10. Fundamentals of Controller Performance Diagnosis
11. Case Studies
Bibliography
Index
Frequently asked questions
Yes, you can cancel anytime from the Subscription tab in your account settings on the Perlego website. Your subscription will stay active until the end of your current billing period. Learn how to cancel your subscription
No, books cannot be downloaded as external files, such as PDFs, for use outside of Perlego. However, you can download books within the Perlego app for offline reading on mobile or tablet. Learn how to download books offline
Perlego offers two plans: Essential and Complete
Essential is ideal for learners and professionals who enjoy exploring a wide range of subjects. Access the Essential Library with 800,000+ trusted titles and best-sellers across business, personal growth, and the humanities. Includes unlimited reading time and Standard Read Aloud voice.
Complete: Perfect for advanced learners and researchers needing full, unrestricted access. Unlock 1.5M+ books across hundreds of subjects, including academic and specialized titles. The Complete Plan also includes advanced features like Premium Read Aloud and Research Assistant.
Both plans are available with monthly, semester, or annual billing cycles.
We are an online textbook subscription service, where you can get access to an entire online library for less than the price of a single book per month. With over 1.5 million books across 990+ topics, we’ve got you covered! Learn about our mission
Look out for the read-aloud symbol on your next book to see if you can listen to it. The read-aloud tool reads text aloud for you, highlighting the text as it is being read. You can pause it, speed it up and slow it down. Learn more about Read Aloud
Yes! You can use the Perlego app on both iOS and Android devices to read anytime, anywhere — even offline. Perfect for commutes or when you’re on the go. Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app
Yes, you can access Process Control Fundamentals by Raghunathan Rengaswamy,Babji Srinivasan,Nirav Pravinbhai Bhatt in PDF and/or ePUB format, as well as other popular books in Biological Sciences & Biotechnology. We have over 1.5 million books available in our catalogue for you to explore.