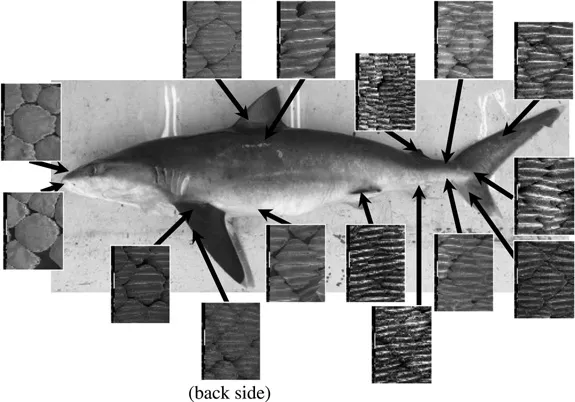
Biomimetics is an innovative paradigm shift based on biodiversity for sustainability. Biodiversity is not only the result of evolutionary adaption but also the optimized solution of an epic combinatorial chemistry for sustainability, because the diversity has been acquired by biological processes and technology, including production processes, operating principles, and control systems, all of which differ from human technology. In the recent decades, biomimetics has gained a great deal of industrial interest because of its unique solutions for engineering problems.
In this book, researchers have contributed cutting-edge results from the viewpoint of two types of industrial applications of biomimetics. The first type starts with engineering tasks to solve an engineering problem using biomimetics, while the other starts with the knowledge of biology and its application to engineering fields. This book discusses both approaches. Edited by Profs. Masatsugu Shimomura and Akihiro Miyauchi, two prominent nanotechnology researchers, this book will appeal to advanced undergraduate- and graduate-level students of biology, chemistry, physics, and engineering and to researchers working in the areas of mechanics, optical devices, glue materials, sensor devices, and SEM observation of living matter.