- 248 pages
- English
- ePUB (mobile friendly)
- Available on iOS & Android
eBook - ePub
Human Response to Vibration
About this book
Through continued collaboration and the sharing of ideas, data, and results, the international community of researchers and practitioners has developed an understanding of many facets of the human response to vibration. At a time when the EU is preparing to adopt a directive on health risks arising from occupational exposure to vibration, Human Response to Vibration offers authoritative guidance on this complex subject.
Individual chapters in the book examine issues relating to whole-body vibration, hand-arm vibration, and motion sickness. Vibration measurements and standards are also addressed. This book meets the needs of those requiring knowledge of human response to vibration in order to make practical improvements to the physical working environment. Written with the consultant, practitioner, researcher, and student in mind, the text is designed to be an educational tool, a reference, and a stimulus for new ideas for the next generation of specialists.
Trusted by 375,005 students
Access to over 1.5 million titles for a fair monthly price.
Study more efficiently using our study tools.
Information
1
Introduction to Vibration
1.1 Human Response to Vibration in Context
Humankind has always had the desire to build, create, and explore. Each of these activities has involved exposure to vibration, whether the source comes from primitive axes, handsaws or riding in carts, from using power tools, industrial machines, or riding in planes, trains, and automobiles. As modern man has harnessed power sources in more efficient ways, the apparatus used to build, create, and explore have used more energy and, as a result, increased quantities of energy have been dissipated in the form of vibration, some of which has been transmitted to people.
One of the most rewarding aspects of studying human response to vibration is its truly multidisciplinary nature (Figure 1.1). For example, the authors listed in the references have varied backgrounds that include engineering, psychology, the natural sciences, clinical medicine, and ergonomics. If the phrase “human response to vibration” is deconstructed into its component parts, then we can consider that a complete grasp of the discipline requires an understanding of the human (biological, anatomical, and physiological aspects), their response (psychological and biomechanical aspects), and the nature of the vibration (in terms of the engineering and underlying physics). Although most researchers have a focus in one of the three main areas, it is the understanding of the interactions between these component parts that is essential in developing our understanding of the topic.
The human aspects and response aspects are the focus of Chapter 2, Chapter 3, and Chapter 4 of this book. Other chapters consider the practicalities of applying this knowledge and the frameworks that are defined in standards and directives. This chapter considers the underlying nature of vibration itself and defines some of the vocabulary that will be used throughout the rest of the book. It considers the fundamentals of wave theory that underpin the discipline (Section 1.2), how vibration is classified when it comes to human response (Section 1.3), and how vibration axes are defined (Section 1.4).
1.2 Introduction to Wave Theory
Vibration is mechanical movement that oscillates about a fixed (often a reference) point. It is a form of mechanical wave and, like all waves, it transfers energy but not matter. Vibration needs a mechanical structure through which to travel. This structure might be part of a machine, vehicle, tool, or even a person, but if a mechanical coupling is lost, then the vibration will no longer propagate.
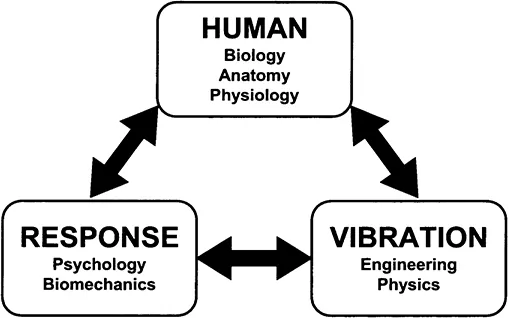
FIGURE 1.1 Component parts and topic areas for the discipline of “human response to vibration.”
This section gives only an introduction to the fundamentals of wave theory. For a more complete discussion of the topic, the reader could consult, for example, Kinsler et al. (2000) or Harris and Piersol (2002).
1.2.1 Simple Waves
The most simple type of wave is defined mathematically as:
where a(t) is the acceleration (measured in m/s2) at time t. This wave has an amplitude A and a frequency f cycles per second (unit = hertz, Hz; Figure 1.2). Such waves are known as sine waves. If the frequency of the wave increases, then the period of the wave will decrease. This means that as each individual cycle takes less time, the frequency rises. In the engineering literature, frequency can also be expressed in terms of radians per second (ω) where:
To define a simple sine wave, we need to know its frequency, its amplitude, and the time from the starting point. Unfortunately, human vibration exposures are rarely these simple sine waves. Therefore, more complex descriptions of waves are required.
1.2.2 Adding Waves
Complex waves can be produced by the addition of sine waves with different amplitudes, frequencies, and phases (i.e., time delays from the start of the wave). This principle of superposition means that when individual component waves interact, the resultant vibration is equal to the sum of all of the components. For example, if five waves of different frequencies are summed, then a complex wave results (Figure 1.3). The beauty of this phenomenon is that the superposition process can be reversed using mathematical techniques such that a complex wave can be resolved into simple component parts, each with different amplitudes, phases, and frequencies. It is this process that allows for consideration of human responses to vibration with simultaneous components of different frequencies. These are the types of vibration signals that are encountered in the real world (e.g., when driving a car, the occupants are simultaneously exposed to low-frequency vibration caused by the general road profile in addition to higher-frequency vibration caused by the roughness of the road surface).
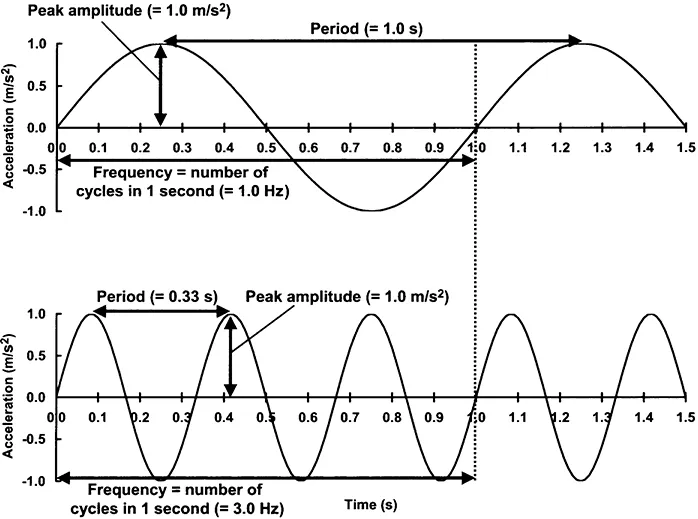
FIGURE 1.2 Basic descriptors for a 1-Hz and a 3-Hz wave with a peak amplitude of 1.0 m/s2.
1.2.3 Displacement, Velocity, and Acceleration
Any vibration signal has three qualities: its displacement, velocity, and acceleration, which are inextricably linked. Consider a slow-moving vertical oscillation, such as a ship rising and falling on large waves. The ship rises on each wave, stops on the wave crest, falls into the trough, and stops and rises again on the next wave. The maximum vertical displacement occurs when the ship is at the top of each wave, yet this coincides with the instant of zero velocity. The greatest velocity occurs while rising or falling (positive or negative). The minimum vertical displacement occurs when the ship is in each trough, when, again, there is zero velocity. There is also an associated cyclic acceleration and deceleration due to the constantly changing velocity. For any wave, the displacement, velocity, and acceleration do not coincide with one another; indeed, for a sine wave, the displacement and acceleration have an inverse relationship (Figure 1.4).
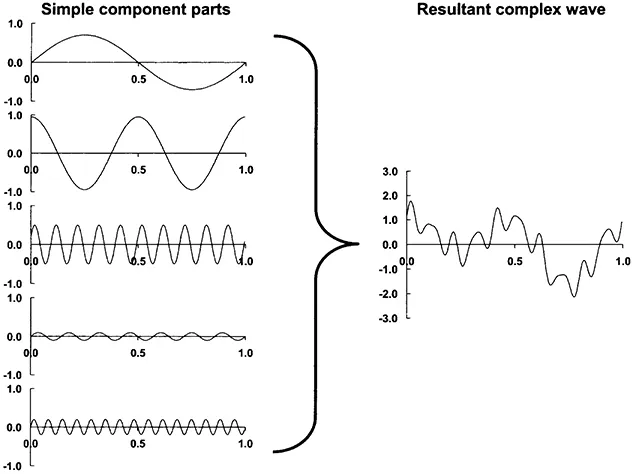
FIGURE 1.3 Illustration of how a complex wave can be produced by adding a small number of simple sine waves with different frequencies, magnitudes, and phase shifts.
Depending on the frequency of the vibration, the displacement, velocity, or acceleration can dominate the mechanism of perceiving whether an object is vibrating. At low frequencies, displacement is the most important property. For example, a person looking out of the window from the top floor of a very tall building on a blustery day might be able to see that he or she is slowly swaying (as tall buildings are designed to do) by observing their relative displacement to the ground, yet not perceive any acceleration or velocity. At intermediate and high frequencies, velocity and acceleration are the most important properties, respectively. For example, it is often easy to perceive the high-frequency vibration from a fan in a piece of electrical equipment by lightly touching the surface of the casing, yet there is no other cue that any vibration exists (e.g., visual).
1.2.4 Resonance
If a compliant mechanical structure is oscillated very slowly, then it will move as a single coherent unit, acting as a pure mass. However, at high frequencies, the vibration can be localized to the point of application, i.e., the structure is isolated from the vibration. It is this principle that is used in car suspensions, engine mounts, and in isolation mechanisms for turntables and CD players. Between these high and low frequencies is a zone where the response of the system will be maximized when compared to the stimulus (Figure 1.5). This is known as resonance. All compliant systems have a resonance frequency, and complex structures have more than one. Many famous disasters have ultimately resulted from a resonant failure, including the 1940 Tacoma Narrows bridge collapse where a new suspension bridge was unable to withstand the high winds that induced vibration at its resonance frequency.
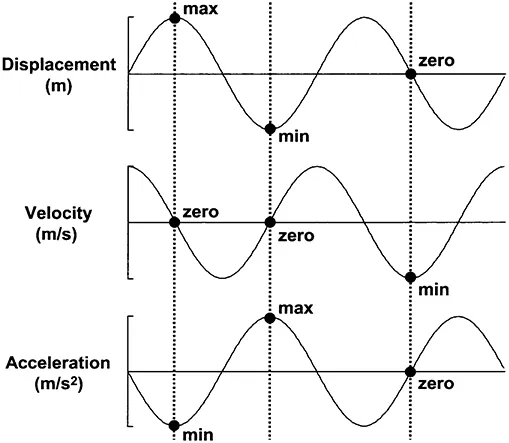
FIGURE 1.4 Displacement, velocity, and acceleration for a sine wave showing asynchronous peaks and troughs.
To ensure that vibration at the resonance frequency does not build up to a point of failure, engineering structures are damped. However, there is a trade-off, as the more damping that exists in a system, the less effective it will be at isolating from high frequency vibration. Humans are inherently highly damped, although resonances are still clearly observable. These resonances mean that if an individual is exposed to vibration, his or her response will depend not only on the magnitude but also on the frequency of the stimulus.
1.2.5 Representation of Vibration Signals
Vibration can be presented in a graphical form where the x-axis of the graph represents time and the y-axis represents the acceleration at any time. This is known as representation in the “time domain.” Although time-domain representations are useful in understanding the waveform of the motion, they are difficult to interpret and cannot usually be applied to standardized analysis methods. Time-domain signals are always presented with linear axes.
An alternative representation of vibration is to present it in the “frequency domain” where the x-axis of the graph is frequency and the y-axis is vibration magnitude. This allows for a representation of how much vibration energy exists at each frequency and is often more useful than time-domain representations for practical purposes. Depending on the application, frequency-domain graphs can be presented with linear or logarithmic axes. For whole-body vibration, the x-axis is usually linear; for hand-transmitted vibration, the x-axis is usually logarithmic. Although frequency-domain graphs are sometimes presented with linear y-axes, human responses to physical stimuli are usually proportional to the logarithm of the stimulus magnitude (e.g., Stevens’ Law; Stevens, 1957) and so a logarithmic y-axis is usually most appropriate when considering the human response to the vibration.
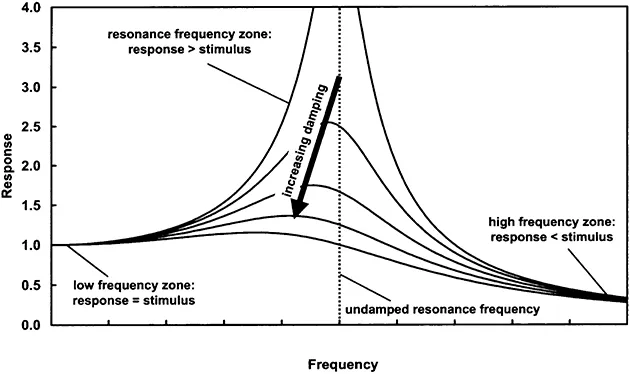
FIGURE 1.5 Response of a simple dynamic system to vibration. At low frequencies, the response equals the stimulus; around the resonance frequency the response is greater than the stimulus; at high frequencies the response is less than the stimulus. As damping increases, the peak response decreases.
1.3 Classification of Vibration
Vibration can be classified using a variety of descriptors. Some ...
Table of contents
- Cover
- Half Title
- Title Page
- Copyright
- Preface
- Acknowledgments
- Table of Contents
- Chapter 1 Introduction to Vibration
- Chapter 2 Whole-Body Vibration
- Chapter 3 Motion Sickness
- Chapter 4 Hand-Transmitted Vibration
- Chapter 5 Vibration Measurement
- Chapter 6 Whole-Body Vibration Standards
- Chapter 7 Hand-Transmitted Vibration Standards
- Chapter 8 European Directives
- References
- Index
Frequently asked questions
Yes, you can cancel anytime from the Subscription tab in your account settings on the Perlego website. Your subscription will stay active until the end of your current billing period. Learn how to cancel your subscription
No, books cannot be downloaded as external files, such as PDFs, for use outside of Perlego. However, you can download books within the Perlego app for offline reading on mobile or tablet. Learn how to download books offline
Perlego offers two plans: Essential and Complete
- Essential is ideal for learners and professionals who enjoy exploring a wide range of subjects. Access the Essential Library with 800,000+ trusted titles and best-sellers across business, personal growth, and the humanities. Includes unlimited reading time and Standard Read Aloud voice.
- Complete: Perfect for advanced learners and researchers needing full, unrestricted access. Unlock 1.5M+ books across hundreds of subjects, including academic and specialized titles. The Complete Plan also includes advanced features like Premium Read Aloud and Research Assistant.
We are an online textbook subscription service, where you can get access to an entire online library for less than the price of a single book per month. With over 1.5 million books across 990+ topics, we’ve got you covered! Learn about our mission
Look out for the read-aloud symbol on your next book to see if you can listen to it. The read-aloud tool reads text aloud for you, highlighting the text as it is being read. You can pause it, speed it up and slow it down. Learn more about Read Aloud
Yes! You can use the Perlego app on both iOS and Android devices to read anytime, anywhere — even offline. Perfect for commutes or when you’re on the go.
Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app
Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app
Yes, you can access Human Response to Vibration by Neil J. Mansfield in PDF and/or ePUB format, as well as other popular books in Medicine & Occupational & Industrial Medicine. We have over 1.5 million books available in our catalogue for you to explore.