eBook - ePub
Basic Mechanics with Engineering Applications
- 424 pages
- English
- ePUB (mobile friendly)
- Available on iOS & Android
eBook - ePub
Basic Mechanics with Engineering Applications
About this book
This book gives a sufficient grounding in mechanics for engineers to tackle a significant range of problems encountered in the design and specification of simple structures and machines. It also provides an excellent background for students wishing to progress to more advanced studies in three-dimensional mechanics.
Trusted by 375,005 students
Access to over 1.5 million titles for a fair monthly price.
Study more efficiently using our study tools.
Information
1
Kinematics
Basic Theory
1.1 Vector quantities
Postion, velocity and acceleration cannot be described solely in terms of magnitude; their directions must also be specified. Quantities which require a definition of both magnitude and direction are called vector quantities; those defined by magnitude only are referred to as scalar quantities. Heavy type will be used to denote a vector, e.g. r is a vector with magnitude r. (A straight line above the symbol, or a wavy line beneath are alternative methods of notation.) A vector quantity is represented graphically by the line and arrow head shown in Fig. 1.1. The length of the line is proportional to the magnitude of the vector and the direction is specified by the orientation of the line and the direction of the arrowhead.
The addition and multiplication of vectors must be carried out according to the rules of vector algebra. For the purposes of this elementary text, which is restricted to the study of motion in a plane, we need only consider the rules of vector addition.
Vector addition
The sum c of two vectors a and b is defined by the diagonal OC of the parallelogram OABC of Fig. 1.2. The lines OA, OB represent the vectors a and b in both magnitude and direction. Upon completion of the parallelogram, its diagonal OC represents the sum, or resultant, of a and b. This method of addition is referred to as the parallelogram rule of vector addition. The length OC and its direction may be obtained by drawing the parallelogram to some convenient scale, or from simple geometry.
We represent the addition of two vectors by the vector equation
c = a + b
where the heavy type indicates that we require a vector sum, as given by the parallelogram rule, rather than the usual scalar sum involving magnitude alone.
An equivalent and more convenient method of adding two vectors is to draw the first vector a, and then the second vector b starting from the tip of vector a, as in Fig. 1.3. The sum, or resultant, c will be the vector from the tail of a to the tip of b and will close the triangle. This is identical to ΔOAC of Fig. 1.2. We could of course have started with the vector b and then added a. This would be equivalent to ΔOBC of Fig. 1.2. The order of the addition is therefore seen to be unimportant, i.e. a + b = b + a.
FIG. 1.1
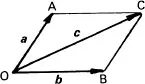
FIG. 1.2
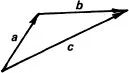
FIG. 1.3
If we wish to add more than two vectors we may extend the above method. For example, to add the four vectors a, b, c and d the sum or resultant e can be obtained by placing them tip to tail as in Fig. 1.4(a), i.e. e = a + b + c + d.
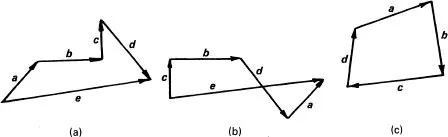
FIG. 1.4
The order can be seen to be unimportant if we recombine them as in Fig. 1.4(b) where e = c + b + d + a.
If the vectors being added form a closed polygon the length of the resultant will be zero, as in Fig. 1.4(c), and their vector sum will be zero, i.e. a + b + c + d = 0.
Components of a vector
It is often convenient to consider a vector in terms of two mutually perpendicular vectors whose sum is equal to the original vector. In Fig. 1.5 the vector c is the sum of the two vectors a and b which...
Table of contents
- Cover
- Halftitle
- Title
- Copyright
- Preface
- Contents
- 1. Kinematics
- 2. Newton’s laws of motion
- 3. Statics
- 4. Dynamics
- 5. Work and Energy
- 6. Impulse and Momentum
- 7. Momentum and mass transfer
- Solutions to Exercises
- Index
Frequently asked questions
Yes, you can cancel anytime from the Subscription tab in your account settings on the Perlego website. Your subscription will stay active until the end of your current billing period. Learn how to cancel your subscription
No, books cannot be downloaded as external files, such as PDFs, for use outside of Perlego. However, you can download books within the Perlego app for offline reading on mobile or tablet. Learn how to download books offline
Perlego offers two plans: Essential and Complete
- Essential is ideal for learners and professionals who enjoy exploring a wide range of subjects. Access the Essential Library with 800,000+ trusted titles and best-sellers across business, personal growth, and the humanities. Includes unlimited reading time and Standard Read Aloud voice.
- Complete: Perfect for advanced learners and researchers needing full, unrestricted access. Unlock 1.5M+ books across hundreds of subjects, including academic and specialized titles. The Complete Plan also includes advanced features like Premium Read Aloud and Research Assistant.
We are an online textbook subscription service, where you can get access to an entire online library for less than the price of a single book per month. With over 1.5 million books across 990+ topics, we’ve got you covered! Learn about our mission
Look out for the read-aloud symbol on your next book to see if you can listen to it. The read-aloud tool reads text aloud for you, highlighting the text as it is being read. You can pause it, speed it up and slow it down. Learn more about Read Aloud
Yes! You can use the Perlego app on both iOS and Android devices to read anytime, anywhere — even offline. Perfect for commutes or when you’re on the go.
Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app
Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app
Yes, you can access Basic Mechanics with Engineering Applications by J. Jones,J. Burdess,J.N. Fawcett,J Jones,J Burdess,J Fawcett in PDF and/or ePUB format, as well as other popular books in Technology & Engineering & Education General. We have over 1.5 million books available in our catalogue for you to explore.