![]()
Part 1
Theoretical bases for
understanding complex
systems in sport
![]()
Robert Hristovski, Natàlia Balaguél Serre and Wolfgang Schöllhorn
The historical roots of the complexity sciences can be traced back to ancient philosophers such as Aristotle (384–322 BC), whose famous saying, ‘The whole is more than the sum of its parts', indicated the duality of holism versus reductionism in science. The beginning of modern Western science is mostly associated with the development of a mechanistic world view, originating in contributions from Galileo, Kepler and Newton in the seventeenth century. The mathematicoexperimental method became trend setting and in the same period Newton created the mathematical basis of dynamical systems theory. By showing explicitly that, celestial mechanics, Earthly tides and falling bodies were governed by the same law of universal gravity, he actually paved the way to what later became a foundation of general systems theory and particularly synergetics: the search for the same principles acting at different levels in the organization of matter. This world view may be conceived as a special kind of holism where general principles manifest themselves through different contexts, i.e. levels of organization. The whole manifests itself through different partial phenomena, owing to different contexts in which these phenomena are embedded.
These ideas have been influential in the movement sciences and, during the 1970s and 1980s, concepts of dissipative structures and self-organization were incorporated in explanations of movement coordination (e.g. Kugler et al. 1980). General predictions of this theoretical approach, such as non-equilibrium phase transitions and critical fluctuations enhancement in cyclic movements, were corroborated (Kelso 1984), and modelled (Haken et al. 1985; Schoner et al. 1986) with great success. These papers became milestones in the search for principles of motor behaviour from a complexity sciences and dynamical systems perspective, which made direct contact with theory in sport science. Principles of self-organization were successfully applied to multi-limb cyclic movements before they were experimentally corroborated (Fuchs et al. 1992) and mathematically modelled (Jirsa et al. 1994) at the level of the central nervous system, as well as in learning processes (Zanone and Kelso 1992). Self-organizing phenomena were also discovered in studies of social coordination (Schmidt et al. 1990). In 2005, a unified model of rhythmic and discrete movements was published (Jirsa and Kelso 2005), predicting as a generic consequence the possibility of the emergence of false starts. In the past two decades, the complex dynamic systems paradigm became a fruitful experimental and theoretical approach in capturing and explaining many phenomena of motor behaviour that are closely related, although not equal, to problems in sports science. This relatedness and prospects of the dynamical systems approach to sports science problems were advocated in the works of Davids and colleagues (see e.g. Davids et al. 1994, 2003).
In the following sections, we define complex systems and point to some main differences between non-living and living systems. We then discuss in more detail the differences between linear and nonlinear dynamical systems and point to some necessary concepts important for understanding why nonlinear dynamics is important in explaining sports phenomena. The material is presented in a way suitable for unfamiliar readers to be acquainted with basic terms and meanings from the complex dynamical systems approach to sports.
What are complex systems?
Complex systems consist of many components which interact among themselves and, as a whole, interact with their environments. Complex systems may be homogenous or heterogeneous. For example, a piece of ice contains innumerable interacting components, i.e. water molecules. These are complex but homogenous systems. Living complex systems, besides having many interacting elements, consist of structurally and functionally heterogeneous (neural, muscle, tendinous, etc.) components, so they belong to the class of heterogeneous complex systems. Biological systems also contain parts existing in different physical phases: fluid (e.g. blood), semi-rigid (muscles have properties of liquid crystals) and rigid (e.g. bones). Social systems, as well, consist of interactions between heterogeneous agents. Thus, whereas between water molecules there is one kind of interaction, i.e. hydrogen bonds, between heterogeneous components there may be different kinds of interactions (generally informational or/and mechanical). These may have varying intensities, and span different spatiotemporal scales, which immensely increases the level of complexity of description of such systems. In such systems, each single component can ‘perceive’ a different environment. There is another important difference between non-living and living complex systems. In non-living systems one can isolate a large portion of the larger system and study it because the behaviour of the system will be the same. This is one of the main advantages that make statistical physics feasible, and in living systems this is not possible. One cannot isolate an organ that will function independently of the organism. Living complex systems are also adaptive and goal directed, while one cannot find an argument to claim the same for the non-living systems. Adaptive systems are those which evolve, develop and learn to negotiate with their environments by changing and fitting their behaviour to emerging constraints.
Besides these qualitative differences, there are universal features that are valid for either living or non-living complex systems. Both kinds of systems possess mutual interactions and interdependence between constituent components. It seems that interactions are largely responsible for the possibility of capturing both kinds of systems within similar formal frameworks because mutual interactions, and recursive self-interactions that result from these, form the nonlinear character of such systems. As a consequence, complex systems, living or non-living, exhibit nonlinear dynamical properties and form the class of complex nonlinear dynamical systems. How these interactions change depends largely on the constraints embedded within the complex systems. Under some constraints, new forms of behaviour emerge spontaneously, without being previously designed and imposed on the system's behaviour, and this is a property of all complex systems, regardless whether they are living or non-living. Complex systems may exhibit complex or simple behaviour. An athlete may perform simple arm-curl rhythmic movements but also may be able to perform complex sequences of dribbling actions. On the other hand, simple systems like a single-component nonlinear pendulum may produce simple oscillatory behaviours but also a very complex pattern of chaotic behaviour. Hence, the complexity of behaviour should not be confused with the complexity of the system. Complex systems may behave in a simple fashion because their interacting components, under certain constraints, may form large coalitions of cooperative elements, which reduces the dimensionality of the behaviour. In this way, a complex system attains simple behaviour and may be treated as a simple system on a macroscopic level. We get simplicity from complexity. There are unifying principles that make possible to treat complex systems in a relatively simple fashion.
Linear and nonlinear complex dynamical systems
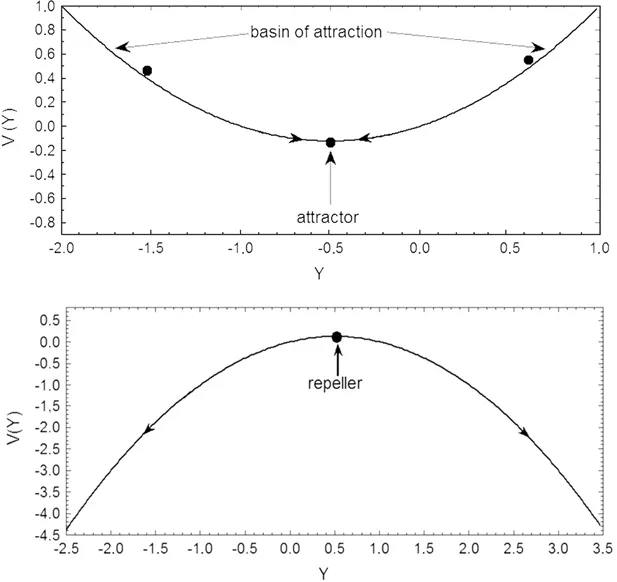
Dynamical systems are systems that change over time. Because all systems change over time, although on different timescales, it follows that all systems are dynamical. They are usually represented by differential or difference equations but also by cellular automata and networks, or even by a mixture of some of these. Dynamical or behavioural variables converge in their evolution to a stable state in which they can dwell infinitely under given sets of constraints. This stable state is called an attractor, because it attracts all nearby initial states of the system (Figure 1.1).
If the system is placed into different initial positions, it will converge to one state that is stable, i.e. the attractor. The set of initial states that converge toward the attractor form its basin of attraction. The attractor can be conceived as a source of forces that pull all initial states toward it. Its antipode is the unstable state called a repeller. The repeller repels all the nearby initial states further away from it. If the system is placed into different initial positions close to the repeller, they will diverge far from it (see Figure 1.1).
Dynamical systems consist of two broad classes: linear and nonlinear. Linear dynamical systems are those whose rate of change of the relevant behavioural variable is a linear function of that same variable. These systems are proportional, in the sense that a small change of the constraints influencing them brings about a small change in the behavioural variable. A large change in constraints is needed to produce a large change in the behavioural variable. In a sense, linear systems are overly flexible because of their proportional response to changing constraints. However, they are monostable (see Figure 1.1); i.e. under any set of constraints they either converge to a well-defined attractor or diverge to infinity if they become unstable. In this sense, linear systems are too rigid.
Figure 1.1 Top: a stable linear system with one attractor and one basin of attraction (see converging arrows). Bottom: unstable linear system with one repeller and diverging flows toward infinity. There are no alternative stable states (attractors) for the behavioural variable Y
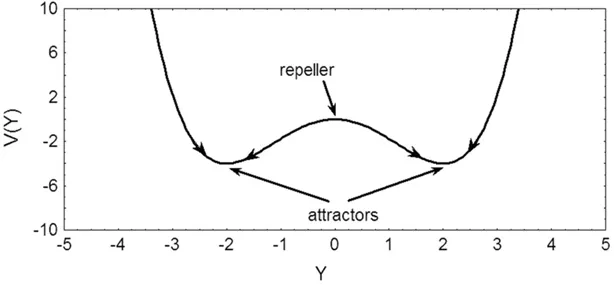
Nonlinear systems, although containing unstable states, i.e. repellers, do not send nearby states to infinity but enable other alternative, behavioural stable finite states (Figure 1.2). Moreover, nonlinear dynamical systems enable more than one stationary behavioural solution for one and the same set of constraints supporting multi-stability of behaviour. Nonlinear systems are safe from exploding to infinity and their behaviour is confined to a set of finite behavioural modes.
Because of this stabilizing property, nonlinear systems enable multiple stable behavioural solutions. In such a way, they are multifunctional and such multifunctionality may be reached and changed by changing system's influential parameters. Hence, multi-functionality of nonlinear system may be harnessed by parametric control.
Figure 1.2 Nonlinear systems can possess repeller(s), but also two or more stable states of the behavioural variable Y and associated basins of attraction shown by converging arrows toward the attractors
Collective variables, instability and bifurcations (phase transitions)
Consider a complex system comprising many, say thousands, of components and their connections, enabling a vast set of interactions among them. If we seek to capture the dynamics of that system we have to formulate thousands of equations describing the dynamical laws governing their behaviour and then solve them to deduce the behaviour of each of those components. This kind of microscopic approach to capturing complex systems behaviour seems quite unreasonable. Think of the complexity of description if we are to deduce the macroscopic behaviour of a biological system, say running, starting from microscopic biochemical processes in each cell of the organism. Fortunately, large masses of cells in living systems perform in coherent and cooperative ways so that they create much smaller numbers of mesoscopic and macroscopic behavioural variables, which render their comprehension easier. These macroscopic variables are those which are essential for describing the coordinated behaviour of the system as a whole and, because they emerge from the cooperative behaviour of collectives of components, they are called collective variables. Since they arise from the collective task dependent cooperation among components, they capture the order, i.e. coordination, present within the system and hence they are called order parameters.
Now, how are these collective variables or order parameters connected to stability and instability properties of the system? It happens that these variables are best detected in the vicinity of the instability points of the system. In this region, the system, after a perturbation, incrementally returns (relaxes) back to the attractor, as some parameter is varied, a property known as a critical slowing down. The increase of the local relaxation time shows that components of the system behave less cooperatively, i.e. they are losing their coherent synergic action and attain a larger degree of independence. As the control parameter nears a critical value, any initial perturbation grows and leaves the previous stable state. This point is called a critical point. At this point, the system suffers a loss of stability and the local relaxation time becomes infinite, since the system never relaxes back to the previous attractor. This ...