![]()
Part I
The Golfer
![]()
Chapter 1
A Spatial Model of the Rigid-Body Club Swing
J. Rees Jones
Abstract
There is scope within the rules of golf to vary the design parameters of a golf club to affect the dynamic properties and so alter the way its swings. The two important design parameters that affect this, from a rigid body standpoint, are its mass and inertia matrix along with those additional parameters that determine their respective position or orientation. A golf swing is assumed to be generated from the combination of an arm and shoulder turn in three-dimensional space. The swing is set to accelerate into a released phase where the club is free to rotate about a virtual spherical joint at the wrist of the player. A mathematical model describing spatial kinematics and the dynamic effects of a swing on a club has been produced. The effect of variations in the parameters and set-up on the rolling, hinging and cocking motion of the hands and the consequential closure at impact are investigated.
Keywords
Golf swing, mechanistic model, spatial kinematics, dynamics, simulation.
Nomenclature
| a,c,h,p | various co-ordinate axis systems. |
| a1, a2, a3 | co-ordinates fixed in the arm with origin at the wrist point P. |
| ax | matrix of direction cosines relating co-ords (x1, x2,x3) of system x those of (a1,a2,a3) in system a. |
| X1,X2,X3 | co-ordinates fixed in the ground with origin at O. |
| I, IP, or [I], [IP] | inertia matrix (or tensor) of club, suffix p for principal inertia. |
| R, RG | position vector of the centre of gravity G with respect to the wrist point P and the fixed origin O respectively. |
| R | a revolute joint or a simple rotation transformation. |
| r | a vector defining the swing path of the wrist pivot P. |
| β | swing angle of projection of the arm onto the swing plane. |
| γ | angle of inclination of the swing plane of the wrist point. |
| [ ] | matrix brackets. |
| { } | column vector brackets. |
Introduction
Players, at all levels of ability and aspiration are at sometime bothered by the design of their clubs and set up at address; not least when attributable adverse effects creep into their game.
The rules laid down by the governing bodies of the game of golf maintain that a “club shall not be substantially different from the tradition and customary form and make”. New designs are subject to approval. And yet claims are made by producers that their design of clubs are different and better than another whilst still satisfying the rules. In general the claims are not substantiated with data defining a club’s dynamic properties; that data is surely contributory, if not crucial, in executing the perfect swing.
Adjustments of the club are not permissible during a round of golf. However, weight adjustments can be made before a round. Typically this is by adding lead tape to a head or changing the mass of plugs screwed in the sole or toe of the club head. The intention of such an adjustment is to modify the swing properties of the club. For a typical player the process of adjustment to optimise the effectiveness and consistency of a swing would be one of trial and error, look and feel. It could be a matter of trying to right a club that was dynamically inappropriate for the purpose, since a wide variation of dynamic properties is possible within the regulations concerning dimensions and form.
For the player, the effectiveness of shot is to be observed in the trajectory, range and accuracy with which a ball reaches its intended target. However, these are a consequence of the velocity of the club head and its path and spatial orientation at the instant of impact with the ball; factors which are not observable without measuring apparatus. Any action by the player to control these factors, following the observation of an ineffective shot, would be coupled by a reaction from the club in conserving dynamic equilibrium. Only the end result of what happens to the ball is observable.
The elastic properties of a club also have significance in the above respect. The elastic deflections of club shaft due to underlying accelerations and transient vibration have a dynamic coupling effect through the grip with the player that can influence his swing. However, such deflections are small enough to be regarded as a superimposition on the much larger underlying rigid body displacements. On this basis the elastic deflection and rigid body models are separable.
Here the choice has been to focus attention on the rigid body dynamic properties. These are mass, position of its centre of gravity and the inertia matrix together with the directions of its principal axes. Apart from the mass itself the rest of the properties are dependent on the distribution of the mass. That such properties can have an affect on the swing has been recognised by others including Nesbit et al. (1996) and the USGA, who patented a measurement procedure US patent (1995), Johnson (1994).
The objective of the work reported here was to set up a model for a computer based simulation of the dynamics of a golf swing to include representation of the spatial motions that exist. By this means the user can vary dynamic properties of a club or change the grip closure in a set-up of the swing motion. All this allows parameter sensitivity studies through observation of the effect on the club head velocity, path and spatial orientation that will otherwise not be available to a player or designer of clubs for that matter.
The Model
A mechanistic model is assumed. It covers the linkage equivalent, its defining geometry and the kinematics of the player’s swing, the dynamic properties of the club and effects of gravitation force and the joint reaction couples experienced when joint limits are approached. The following show the development of the formulation needed for a computer implementation.
The Kinematic Model of the Shoulders, Arms and Wrist Joint
Relative to the arms, the hands that grip the club can move with three degrees of freedom, as though connected by a spherical joint. The centre of the joint is considered to be an approximation of the axode of the instantaneous screw axis describing the relative motion. This point, somewhere near the base of the palm of the right hand, will be called the wrist point and labelled P. Such a joint is reasonably well modelled by three joints, revolute pairs R-R-R, placed in series with their axes concurrent and orthogonal. Together they are referred to as the wrist joint.
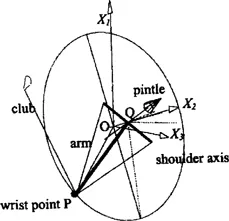
Relative to the torso the arms together with shoulders are assumed to complete a triangle. See Figure 1. The fact that the right elbow will normally hinge in the process of swing will not make much practical difference to the geometry. The wrist point is then one apex of the triangle while the other two lie on the shoulder joint axis. The arms may then rotate about the shoulder axis, defined as a line through the shoulder joints. The shoulders are able to rotate about an axis, here called the pintle, assumed stationary with respect to the torso or ground. The arms together with the shoulders joined to the torso can be represented as a two-link mechanism joined in series by two revolute joints (R-R) whose axes are mutually normal and concurrent.
Figure 1. Shows an instant of the representative shoulder and arm configuration with the inclined circle that includes the arc of the wrist point path.
The Motion of the Wrist Point
In the downswing the wrist point is considered to move with the arms and shoulders about the pintle at the upper end of the player’s spine. If free to, the wrist point P could trace the surface of a sphere whose radius is that of the arms. But here the path of the wrist point is constrained to move in a plane and trace a circular arc of radius less than the arm.
For the present purpose only the downswing is of consequence. The initial conditions are then the residual conditions existing at the top of the backswing. From then on the motion of the wrist point in its downswing is assumed to be in two phases.
In the first phase the wrist point P actively accelerates along its path. The initial conditions of that acceleration are a continuation of that at the top of the upswing. In the progress through the first phase the wrist joint acceleration component along its path diminishes continuously to zero. The club, through the hands, is under the influence of a reaction couple resulting from the hands being cocked against their inherent displacement limits. This couple does little more than maintain the cocked angle during this first phase of motion. What little more is achieved serves to produce some angular velocity of the club relative to the arms in anticipation of the second phase.
The second phase is here termed the release. In this the wrist is in a relaxed state leaving free rotational movement of the hands and club relative to the arm; unless affected by physical limits on the joints. The wrist point has to maintain constant velocity along and through the bottom of its circular path. A top player will have to sustain considerable force at the wrist joint to maintain this velocity. So, in this phase a zero couple is assumed but very significant forces are recognised to exist at the wrist point normal and tangential to its path. In this phase the hands and club behave as a compound pendulum swinging freely about a spherical joint in a very high gravitational field. That field is equivalent to the centripetal acceleration of the wrist point and is commonly as high as 20 g amongst competent players.
The motion is found, in related theoretical work of the author, to represent near optimal conditions in the released swing described. It is manifest in high-speed images captured during the swing motion of top-ranking players. The club head accelerates very rapidly just before the arms reach the bottom of their swing. Then the angular velocity of the club surpasses that of the arms to reach a near maximum. At this instant the club and arm axis fall into a single plane where the head should strike the ball and pass through. The plane referred to lies through the stationary ball and the point Q at the player’s neck with its normal pointing towards the target. This plane will subsequently be referred here to as the Q-ball plane.
The wrist point motion is considered central to the definition of the player’s input to the swing.
Miura and Naruo (1998) also treat wrist point motion in their modelling of golf swings as central in modelling the dynamics of a swing. They restrict their study to the simpler planar two-link model and show simulation results where the downswing of the wrist is given a constant acceleration in one case and a pulse of sinusoidal acceleration in another. The wrist joint is considered free throughout this downswing so that reaction couples due to over cocking are unconsidered. In these respects their model differs from that presented here.
Two and three link models prevail in the literature, examples of those are found in Miura and Naruo (1998) and Turner and Hills (1999) respectively. However, they specifically model shoulder, arms and club that move in a common single plane. The kinematic structure of the model presented here is also one of three links but differs significantly in three respects. The first is that five revolute joints are involved instead of two or three in the planar cases cited. The second is a spatial R-R-R model of the wrist joint. The third is that simultaneous motion of the shoulder on its pintle axis and the arms on the shoulder axis produce a compound spatial rotation of the triangle representing the arms; by this means an additional rotation given to the hands is taken into account
The Co-Ordinate Systems and Transformations
The formulation of the kinematic and dynamic equations requires co-ordinate systems to be set up in each body with additional for ones for various other purposes.
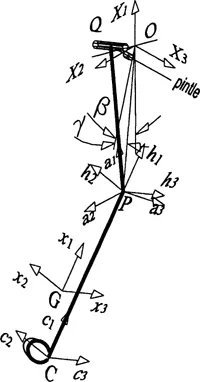
Fig.2 shows the Cartesian co-ordinate systems, used herein. Each has a label identified by a single lower case Roman letter: a in the arm, h in the hand and x, c and p in the club. The one exception is the co-ordinate system fixed in the ground that is labelled with the upper case X. Each axis of a system is given a number 1,2 or 3 written as a subscript to its label. For example x1,x2, x3 which, in this order, defines a right-handed system.
Figure 2. Shows the co-ordinate systems used to set up the equations of motion for the swing.
The transformations between co-ordinate systems are written as Xa, transforming co-ordinates from system a into X. which, where any ambiguity may occur, will be written in square brackets thus [Xa].
A transformation operation is then written as:
where Xa is 3×3 orthogonal transformation matrix, its elements are the projection of a unit vector in the direction of the a1,a2,a3 axes onto the X1,X2,X3 axes.
Whe...