Essentials of Vehicle Dynamics explains the essential mathematical basis of vehicle dynamics in a concise and clear way, providing engineers and students with the qualitative understanding of vehicle handling performance needed to underpin chassis-related research and development.Without a sound understanding of the mathematical tools and principles underlying the complex models in vehicle dynamics, engineers can end up with errors in their analyses and assumptions, leading to costly mistakes in design and virtual prototyping activities. Author Joop P. Pauwelussen looks to rectify this by drawing on his 15 years' experience of helping students and professionals understand the vehicle as a dynamic system. He begins as simply as possible before moving on to tackle models of increasing complexity, emphasizing the critical role played by tire-road contact and the different analysis tools required to consider non-linear dynamical systems.Providing a basic mathematical background that is ideal for students or those with practical experience who are struggling with the theory, Essentials of Vehicle Dynamics is also intended to help engineers from different disciplines, such as control and electronic engineering, move into the automotive sector or undertake multi-disciplinary vehicle dynamics work.
- Focuses on the underlying mathematical fundamentals of vehicle dynamics, equipping engineers and students to grasp and apply more complex concepts with ease.
- Written to help engineers avoid the costly errors in design and simulation brought about by incomplete understanding of modeling tools and approaches.
- Includes exercises to help readers test their qualitative understanding and explain results in physical and vehicle dynamics terms.
Trusted by 375,005 students
Access to over 1.5 million titles for a fair monthly price.
Chapter 1 introduces the main topics and provides an outline of the book. It briefly discusses the application of vehicle dynamics in vehicle design, the required background of the reader, and the system approach. It emphasizes the importance of tire–road contact, the vehicle–driver interface, and the distinction between linear and nonlinear extreme vehicle behavior.
Vehicle dynamics describes the behavior of a vehicle, using dynamic analysis tools. Therefore, to understand vehicle behavior, one must have a sufficient background in dynamics. These dynamics may be linear, as in case of nonextreme behavior, or nonlinear, as in a situation when tires are near saturation (i.e., when the vehicle is about to skid at front or rear tires.). Hence, the tires play a critical role in vehicle handling performance.
To improve handling comfort, the predictability of the vehicle performance from the control activities of the driver (i.e., using the steering wheel, applying the brake pedal, or the pushing the gas pedal) must be considered. The road may be flat and dry, but one should also consider cases of varying road friction or road disturbances.
In this case, the major response of the vehicle can be explained based on a linear vehicle model. The state variables, such as yaw rate (in-plane rotation of the vehicle, which is the purpose of steering wheel rotation), body slip angle (drifting, meaning the vehicle is sliding sideways), and forward speed follow from a linear set of differential equations, where we neglect roll, pitch, elastokinematic effects, etc. These effects can be added in a simple way, which will result in only slight modifications in the major handling performance. The control input from the driver causes a (rotational, translational) dynamic vehicle response, which results in inertia forces being counteracted by forces between tires and road. These forces are, in first order, proportional to tire slip. In general, tire slip describes the proportionality between local tire deformation and the longitudinal position in the tire contact area. Tire slip is related to vehicle states (yaw rate, body slip angle) or vehicle forward speed and wheel speeds, in case of braking or driving (longitudinal slip). The analysis of this linear system, with an emphasis on the vehicle (mainly tire) specific stability properties, forms the basis of vehicle handing performance and must be well understood. Any further enhancement of the model’s complexity, such as adding wheel kinematics, vehicle articulations (caravan, trailer, etc.), or load transfer, will lead to an improved assessment of vehicle handling performance, but always in terms of performance modifications of the most simple dynamical vehicle system, i.e., with these effects neglected.
The theory of linear system dynamics is well established and many tools related to state space format are available; this includes local stability analysis that refers to the eigenvalues of the linear vehicle system. Therefore, once the handling problem is formulated in (state space) mathematical terms, as follows,
(1.1)
(1.1)
an extensive toolbox is available to the researcher. In Eq. (1.1),
denotes the state vector (e.g., yaw rate, wheel speed),
denotes the input (e.g., steering angle, brake force), and
denotes the system output.
However, a mathematical background in system dynamics alone is not sufficient for solving vehicle dynamics problems. The experience in lecturing on vehicle dynamics shows that there is room for improvement in the mathematical background of the students, with reference to multivariate analysis, Laplace transformation, and differential equations. For this reason, we included a number of necessary commonly used tools in the appendices for further reference. These tools will help the researcher to interpret model output in physical terms. The strength of the simple linear models is the application and therefore, the interpretation to understanding real vehicle behavior. The researcher should answer questions such as:
– What is the impact of axle characteristics (force versus slip) or center of gravity position on vehicle handling performance?
– How are the axle characteristics related to kinematic design?
– How are the axle characteristics related to internal suspension compliances?
– How reliable are axle characteristics parameters and how robust are our analysis results against variations of these parameters?
– What is the impact of roll stiffness on front and rear axles on simplified model parameters?
– How can we take driving resistance (additional drive force to prevent the vehicle speed from decreasing) into account?
In addition, the contents of this book should be linked to practical experience in testing, aiming at model validation and parameter identification.
Moving to extreme vehicle behavior, a problem arises in the sense that the vehicle model becomes nonlinear. In the case of linear vehicle performance, the vehicle is either globally stable or globally unstable, with stability depending on vehicle and tire characteristics. One can analytically determine the vehicle’s response for a specific driver control input and investigate the sensitivity regarding vehicle parameters. Therefore, a researcher is able to use both qualitative tools (is the model correctly described at a functional level?) and quantitative tools (does the model match experimental results?) to analyze the vehicle model in reference to experimental evidence.
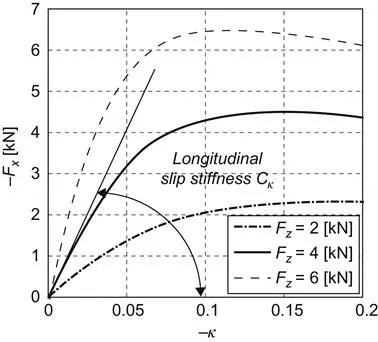
For a nonlinear model, situations change principally. Nonlinear models arise if we accept that the axle characteristics depend nonlinearly on slip (i.e., when one of the axles is near saturation). A typical example of longitudinal tire behavior in terms of brake force Fx versus brake slip κ (defined in (2.19)) is shown in Figure 1.1 for various wheel loads Fz (see Section 2.4 for a more extensive treatment of longitudinal tire characteristics).
Figure 1.1 Longitudinal tire characteristics.
For small brake slip κ, this relationship is described as linear, with proportionality factor Cκ, between slip and tire force, as indicated in Figure 1.1. Clearly, for brake slip 0.05 or higher, this linear approximation is incorrect.
When considering safety, we must account for nonlinear model behavior. Are the driver (closed loop) and vehicle (open loop) capable of dealing with dangerous driving conditions, with or without a supporting controller?
With a stable linear model, any small disturbance (input, external circumstances) leads to a small difference in vehicle response. For a nonlinear system being originally stable, a small disturbance may result in unstable behavior, i.e., with a large difference in vehicle response. For example, with an initial condition of a vehicle approaching a stable circle, a small change could result in excessive yawing of the vehicle (i.e., stability is completely lost). Consequently, quantitative tools (i.e., calculating the response by integrating the system equations) cannot be interpreted any further in a general perspective. However, there are ways to get around this problem:
– Consider the linearization of the model around a steady-state solution (where there may be multiple solutions, in contrast to the linear model where one solution is found in general), and use the analysis tools for the linear model to find the model performance near this steady-state solution.
– Use qualitative (graphical) analysis tools specifically designed for nonlinear dynamical systems. A number of these tools are discussed in Chapter 5 and the appendixes, with distinctions made for phase plane analysis, stability and handling diagrams, the MMM method, and the “g–g” diagram.
This last approach may seem to be insufficient, but remember that quantitative response only makes sense if the so-called qualitative “structural” model response is well matched. Is the order of the system correct and are trends and parameter sensitivities confirmed by the model? In other words, is the mathematical description of the model sufficient to match vehicle performance if the right parameter values are selected? For example, quadratic system performance will never be matched with sufficient accuracy to a linear model. In the same way, one must ensure that the vehicle nonlinear performance (and specifically the axle or tire performance) is well validated from experiments.
Mathematical analysis of vehicle handling always begins with the objective to understand certain (possibly actively controlled) vehicle performance, or to guarantee proper vehicle performance within certain limits. Therefore, the first priority is a good qualitative response. Moving into quantitative matching with experimental results (as many students appear to do) under certain unique circumstances only guarantees a certain performance under these unique circumstances. In other words, without further general understanding of the vehicle performance, such matching gives no evidence whatsoever on appropriate vehicle performance under arbitrary conditions. Testing and quantitative matching for all possible conditions may be an alternative of qualitative matching (and assessing the structural system properties), but this is clearly not feasible in practice.
This book is structured as follows. In Chapter 2, we will discuss fundamentals of tire behavior. The chapter follows the classical approach by first treating the free rolling tire (including rolling resistance), which is followed by discussions on purely longitudinal and lateral tire characteristics and combined slip. First, we focus on empirical tire models, which are essential elements of any vehicle handling simulation study. Second, we discuss two physical tire models: the brush model and the brush-string model. These models are not intended for use in practical simulation studies; however, they enable a deeper understanding of the physical phenomena in the tire–road contact under steady-state slip conditions.
When vehicle speed is relatively low and/or tires experience loading frequencies beyond 4 Hz (as in case of road disturbances or certain control measures), the steady-state assumption on tire performance (tire belt follows rim motions instantaneously) is no longer valid. A first step to include dynamics is to consider the tire as a first order (relaxation) system. Higher order dynamics require the belt osci...
Table of contents
Cover image
Title page
Table of Contents
Copyright
Dedication
Preface
Chapter One. Introduction
Chapter Two. Fundamentals of Tire Behavior
Chapter Three. Nonsteady-State Tire Behavior
Chapter Four. Kinematic Steering
Chapter Five. Vehicle Handling Performance
Chapter Six. The Vehicle–Driver Interface
Chapter Seven. Exercises
Appendix 1. State Space Format
Appendix 2. System Dynamics
Appendix 3. Root Locus Plot
Appendix 4. Bode Diagram
Appendix 5. Lagrange Equations
Appendix 6. Vehicle Data
Appendix 7. Empirical Magic Formula Tire Model
Appendix 8. The Power Spectral Density
List of Symbols
References
Index
Frequently asked questions
Yes, you can cancel anytime from the Subscription tab in your account settings on the Perlego website. Your subscription will stay active until the end of your current billing period. Learn how to cancel your subscription
No, books cannot be downloaded as external files, such as PDFs, for use outside of Perlego. However, you can download books within the Perlego app for offline reading on mobile or tablet. Learn how to download books offline
Perlego offers two plans: Essential and Complete
Essential is ideal for learners and professionals who enjoy exploring a wide range of subjects. Access the Essential Library with 800,000+ trusted titles and best-sellers across business, personal growth, and the humanities. Includes unlimited reading time and Standard Read Aloud voice.
Complete: Perfect for advanced learners and researchers needing full, unrestricted access. Unlock 1.5M+ books across hundreds of subjects, including academic and specialized titles. The Complete Plan also includes advanced features like Premium Read Aloud and Research Assistant.
Both plans are available with monthly, semester, or annual billing cycles.
We are an online textbook subscription service, where you can get access to an entire online library for less than the price of a single book per month. With over 1.5 million books across 990+ topics, we’ve got you covered! Learn about our mission
Look out for the read-aloud symbol on your next book to see if you can listen to it. The read-aloud tool reads text aloud for you, highlighting the text as it is being read. You can pause it, speed it up and slow it down. Learn more about Read Aloud
Yes! You can use the Perlego app on both iOS and Android devices to read anytime, anywhere — even offline. Perfect for commutes or when you’re on the go. Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app
Yes, you can access Essentials of Vehicle Dynamics by Joop Pauwelussen,Joop P. Pauwelussen in PDF and/or ePUB format, as well as other popular books in Mathematics & Applied Mathematics. We have over 1.5 million books available in our catalogue for you to explore.