eBook - ePub
Tethered Space Robot
Dynamics, Measurement, and Control
- 316 pages
- English
- ePUB (mobile friendly)
- Available on iOS & Android
eBook - ePub
Tethered Space Robot
Dynamics, Measurement, and Control
About this book
Tethered Space Robot: Dynamics, Measurement, and Control discusses a novel tethered space robot (TSR) system that contains the space platform, flexible tether and gripper. TSR can capture and remove non-cooperative targets such as space debris. It is the first time the concept has been described in a book, which describes the system and mission design of TSR and then introduces the latest research on pose measurement, dynamics and control. The book covers the TSR system, from principle to applications, including a complete implementing scheme. A useful reference for researchers, engineers and students interested in space robots, OOS and debris removal.
- Provides for the first time comprehensive coverage of various aspects of tethered space robots (TSR)
- Presents both fundamental principles and application technologies including pose measurement, dynamics and control
- Describes some new control techniques, including a coordinated control method for tracking optimal trajectory, coordinated coupling control and coordinated approaching control using mobile tether attachment points
Trusted by 375,005 students
Access to over 1.5 million titles for a fair monthly price.
Study more efficiently using our study tools.
Information
Chapter 1
Introduction
Abstract
In recent years, there has been a growing interest in active debris removal (ADR) due to the treatment of space debris in the orbital environment. Different kinds of robotic devices have been developed for various space targets. In this chapter, a brief review of the ADR missions and technologies is given first to help readers have an “intuitionistic” cognition on ADR. Background information, including the brief history of space tentacles, space manipulators, space tethers, and tethered space robots (TSR), is provided. Then, the design of the TSR and a classical mission scenario are described, which form the foundations of the subsequent chapters of this book.
Keywords
Active debris removal; Space tentacles; Space manipulator; Space tether; Capture phase; Deorbiting phase
In recent years, there has been a growing interest in active debris removal (ADR) due to the treatment of space debris in the orbital environment. Different kinds of robotic devices have been developed for various space targets. In this chapter, a brief review of the ADR missions and technologies is given first to help readers have an “intuitionistic” cognition on ADR. Background information, including the brief history of space tentacles, space manipulators, space tethers, and tethered space robots (TSR), is provided. Then, the design of the TSR and a classical mission scenario are described, which form the foundations of the subsequent chapters of this book.
1.1 Background
Since the realization that space debris poses a threat for space activities, many capture and removal techniques have been investigated to clean the Earth's orbit. The solution to this space debris problem will consist of multiple methods, as no single capturing method can deal with the different kinds of space debris. Due to their relative maturity, space tentacles [1–4] and space manipulators (including single [5–7] and multiple arms [8]) are among the first methods that have been proposed for the capture of space debris.
However, rigid manipulators only work for short-range targets and point-to-point capture is difficult and risky, especially for an uncooperative target. Therefore, the space tether is considered to be the most promising approach for capturing debris. Most traditional applications of the space tether (e.g., orbit transfer or artificial gravity) are impossible or excessively costly with the existing space technology and engineering capacity. With the maturity of space tether technology and the high demand for new space tasks, research on the design, dynamics, control, and testing of various space tethers are motivated by their potential in space applications. TSR is precisely a new application of space tether for ADR.
1.1.1 Brief History of the Space Tentacles
In ESAs e.Deorbit project [1], tentacles are used for capturing debris, either with or without a robotic arm. If a robotic arm is used, tentacle capturing embraces the space debris with a clamping mechanism after holding a point on the target with the robotic arm. Finally, a velocity increment by the chaser will deorbit the combined object. A trade-off shows that tentacle capturing with a robotic arm leads to a higher cost, mass, volume, hazardousness, and complexity of design compared to one without a robotic arm. Although the simulation of the target grabbing without a robotic arm performs successfully, practical missions require more stringent grabbing conditions because of high precision requirements. Aviospace is also a tentacles capture device working on the project CADET [2], which is in a closed configuration made by belts to soften the contact between tentacles and target. Finite element simulation and ground-based testing have been conducted for the capturing process and dynamics behavior, and the detailed design has been in progress since June 2014. Yoshida and his team proposed another type of tentacle that is inspired by biology and is named the Target Collaborativize (TAKO) Flyer [3]. TAKO is composed of a main service satellite and a TAKO Gripper. This gripper is composed of several fingers driven by the gas pressure in a pneumatic bellows. The TAKO Flyer can also use several thrusters installed on the TAKO Gripper in order to work on nonoperational targets that may be tumbling or that have failed to provide information. OctArm is a variant tentacle capturing device proposed by McMahan in Ref. [4] that contains three sections connected by the endplates. Each section is constructed with air muscle actuators and it is capable of two axis bending and extension with nine degrees of freedom.
According to the aforementioned four kinds of tentacles, the advantages of the tentacles are clear, including the stiff composite, easy ground test, and higher Technology Readiness Level (TRL). However, the drawbacks are also distinct, such as complicated rendezvous, possible bouncing, and the requirement of accurate information of relative positioning and velocity.
1.1.2 Brief History of the Space Manipulator
On-orbit service (OOS) comprises all aspects of on-orbit assembly of parts into systems, maintenance of equipment (preventative and corrective), replenishment of consumables, upgrade, repair, and of course, target capture and removal [8–10]. Most malfunctioning spacecraft have to be replaced due to the lack of OOS opportunities. The accomplishment of OOS missions would be of great benefits, such as spacecraft assembly, orbit transfer, maintenance and repair, resupply, or even safe deorbiting. Over more than a decade, numerous projects around the world have dealt with OOS of spacecraft supported by space robotics. A major subset of OOS consists of unmanned OOS missions that use a space robot.
Most manned OOS missions are critical for astronauts and are extremely expensive. In contrast to manned OOS missions, unmanned robotic OOS missions play a more important role in the development of OOS. As early as the 1980s, the National Aeronautics and Space Administration (NASA) realized the importance of robotics on-orbit servicing operations to protect their assets in space. Space robotics is considered one of the most promising approaches for unmanned on-orbit servicing (OOS) missions, such as docking, berthing, refueling, repairing, upgrading, transporting, rescuing, and orbital debris removal [11]. Many enabling space robotics techniques have been developed, and several OOS experimental demonstration missions, including both manned and unmanned missions, have been successfully accomplished in the past two decades.
The German ROTEX (Robot Technology Experiment) is one of the milestones of space robot technology, shown in Fig. 1.1. ROTEX was conducted in May 1993 in the space shuttle experiment module and operated by an onboard astronaut and an operator on the ground [12]. ROTEX was the first remotely controlled robot in space, and several key technologies were successfully tested, such as a multisensory gripper, teleoperation from the ground, shared autonomy, and time-delay compensation by a predictive 3D-stereo-graphic display.

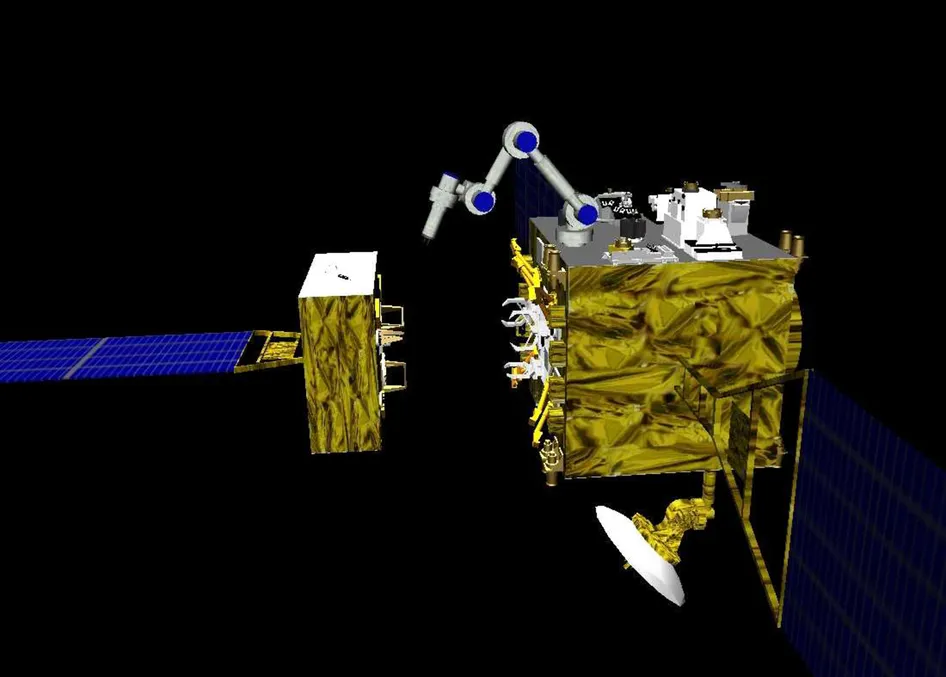
The Japanese ETS-VII (Engineering Test Satellite VII) is another milestone in the development of space robot technology and is considered to be the first robotic OOS demonstration mission [13], shown in Fig. 1.2. Different from ROTEX, the ETS-VII's robot system is a satellite mounted EVA (extra-vehicular-activity) type robot while ROTEX is an IVA (intra-vehicular-activity) type robot. ETS-VII includes a 2-m long, 6-degrees-of-freedom robotic arm mounted on an unmanned spacecraft. It was developed by the National Space Development Agency of Japan (NASDA) and launched in November 1997. The objective of the ETS-VII mission was to verify technologies for autonomous rendezvous, and docking and robotic servicing in space. These technologies include teleoperation from the ground with a time-delay, robotic servicing task demonstrations such as ORU exchange and deployment of a space structure, dynamically coordinated control between the manipulator's reaction and the satellite's response, and capture and berthing of a target satellite [14–16].
The Defense Advanced Research Projects Agency's (DARPA) Orbital Express program was successfully launched and accomplished in 2007 [17]. The Orbital Express system comprises two satellites, the ASTRO (Autonomous Space Transfer & Robotic Orbital Servicer) servicing vehicle that included a 6-DOF rotary joint robotic arm, and the NextSat demonstration client vehicle [18]. As an advanced OOS technology demonstration mission, it demonstrated the technologies of one spacecraft servicing another one, such as short-range and long-range autonomous rendezvous and docking, capture and berthing, robotic ORU replacements, on-orbit refueling, and autonomous fly-around visual inspection [19, 20].
The SUMO (Spacecraft for the Universal Modification of Orbits) was another risk reduction program for an advanced servicing spacecraft sponsored by DARPA and executed by the NRL (Naval Research Laboratory) in 2002, shown in Fig. 1.3. The purpose of this program was to demonstrate the integration of machine vision, robotics, mechanisms, and autonomous control algorithms to accomplish autonomously rendezvous and capture customer satellites at geosynchronous orbits for future spacecraft servic...
Table of contents
- Cover image
- Title page
- Table of Contents
- Copyright
- Chapter 1: Introduction
- Chapter 2: Dynamics Modeling of the Space Tether
- Chapter 3: Pose Measurement Based on Vision Perception
- Chapter 4: Optimal Trajectory Tracking in Approaching
- Chapter 5: Approaching Control Based on a Distributed Tether Model
- Chapter 6: Approaching Control Based on a Movable Platform
- Chapter 7: Approaching Control Based on a Tether Releasing Mechanism
- Chapter 8: Approaching Control Based on Mobile Tether Attachment Points
- Chapter 9: Impact Dynamic Modeling and Adaptive Target Capture Control
- Chapter 10: Postcapture Attitude Control for a TSR-Target Combination System
- Conclusions
- Index
Frequently asked questions
Yes, you can cancel anytime from the Subscription tab in your account settings on the Perlego website. Your subscription will stay active until the end of your current billing period. Learn how to cancel your subscription
No, books cannot be downloaded as external files, such as PDFs, for use outside of Perlego. However, you can download books within the Perlego app for offline reading on mobile or tablet. Learn how to download books offline
Perlego offers two plans: Essential and Complete
- Essential is ideal for learners and professionals who enjoy exploring a wide range of subjects. Access the Essential Library with 800,000+ trusted titles and best-sellers across business, personal growth, and the humanities. Includes unlimited reading time and Standard Read Aloud voice.
- Complete: Perfect for advanced learners and researchers needing full, unrestricted access. Unlock 1.5M+ books across hundreds of subjects, including academic and specialized titles. The Complete Plan also includes advanced features like Premium Read Aloud and Research Assistant.
We are an online textbook subscription service, where you can get access to an entire online library for less than the price of a single book per month. With over 1.5 million books across 990+ topics, we’ve got you covered! Learn about our mission
Look out for the read-aloud symbol on your next book to see if you can listen to it. The read-aloud tool reads text aloud for you, highlighting the text as it is being read. You can pause it, speed it up and slow it down. Learn more about Read Aloud
Yes! You can use the Perlego app on both iOS and Android devices to read anytime, anywhere — even offline. Perfect for commutes or when you’re on the go.
Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app
Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app
Yes, you can access Tethered Space Robot by Panfeng Huang,Zhongjie Meng,Jian Guo,Fan Zhang in PDF and/or ePUB format, as well as other popular books in Technology & Engineering & Automation in Engineering. We have over 1.5 million books available in our catalogue for you to explore.