eBook - ePub
Brain-Computer Interfacing for Assistive Robotics
Electroencephalograms, Recurrent Quantum Neural Networks, and User-Centric Graphical Interfaces
- 258 pages
- English
- ePUB (mobile friendly)
- Available on iOS & Android
eBook - ePub
Brain-Computer Interfacing for Assistive Robotics
Electroencephalograms, Recurrent Quantum Neural Networks, and User-Centric Graphical Interfaces
About this book
Brain-computer interface (BCI) technology provides a means of communication that allows individuals with severely impaired movement to communicate with assistive devices using the electroencephalogram (EEG) or other brain signals. The practicality of a BCI has been possible due to advances in multi-disciplinary areas of research related to cognitive neuroscience, brain-imaging techniques and human-computer interfaces. However, two major challenges remain in making BCI for assistive robotics practical for day-to-day use: the inherent lower bandwidth of BCI, and how to best handle the unknown embedded noise within the raw EEG.
Brain-Computer Interfacing for Assistive Robotics is a result of research focusing on these important aspects of BCI for real-time assistive robotic application. It details the fundamental issues related to non-stationary EEG signal processing (filtering) and the need of an alternative approach for the same. Additionally, the book also discusses techniques for overcoming lower bandwidth of BCIs by designing novel use-centric graphical user interfaces. A detailed investigation into both these approaches is discussed.
- An innovative reference on the brain-computer interface (BCI) and its utility in computational neuroscience and assistive robotics
- Written for mature and early stage researchers, postgraduate and doctoral students, and computational neuroscientists, this book is a novel guide to the fundamentals of quantum mechanics for BCI
- Full-colour text that focuses on brain-computer interfacing for real-time assistive robotic application and details the fundamental issues related with signal processing and the need for alternative approaches
- A detailed introduction as well as an in-depth analysis of challenges and issues in developing practical brain-computer interfaces.
Trusted by 375,005 students
Access to over 1.5 million titles for a fair monthly price.
Study more efficiently using our study tools.
Information
Topic
InformatikChapter 1
Introduction
Verbal or non-verbal information exchange is the basis of human communication. However, some people lose this fundamental ability of communication through accidents or inherited neuromuscular disorders. In the absence of methods for repairing or restoring function due to disease or damage, various alternatives in the form of assistive devices to enable individuals to communicate with and control their environment have been developed. The brain–computer interface (BCI), i.e., electroencephalography (EEG)-based communication, is a new way of controlling devices that does not require eye movement or muscle activity. This chapter introduces the various components of a typical BCI system and explains each component’s importance and function within the complete BCI system.
Keywords
Brain–computer interface; electroencephalography; graphical user interface; motor imagery; signal filtering
1.1 Introduction
Verbal or non-verbal information exchange is the basis of human communication. However, some people lose this fundamental ability of communication because of accidents or inherited neuromuscular disorders. The purpose of the work presented in this book is to contribute to the development of novel methods to allow people to regain freedom of movement/communication by way of controlling devices directly with their brain, bypassing the normal communication channels.
The human brain is estimated to contain about 100 billion neurons [1–4]. The spinal cord acts as an intermediate cable that carries information to and from our brain to control various body parts and their movements. People with an injury to the spinal cord are still able to generate the output signals from the brain, but these signals do not reach the specific body parts because the intermediate spinal cable is damaged. Several technologies using a joystick, head movement, eye gazing and many more may help a physically challenged person to control a robotic device or a wheelchair [5–9]. However, these techniques require the use of partial movement control through the hand, head or eyes etc., and therefore make the control issue less complicated. The issue becomes more challenging when people with complete loss of control over their voluntary muscles are involved, a condition generally known as locked-in syndrome [10,11], in which people are unable to speak and move but are conscious and can think and reason. A number of neurological diseases such as stroke1, severe cerebral palsy2, motor neuron disease (MND)3, amyotrophic lateral sclerosis (ALS), and encephalitis4 can result in such severe motor paralysis [12]. Many of these diseases can lead to restrictions in communication capacity. A brain–computer interface (BCI) can enable such physically challenged people to achieve greater independence by making technology accessible. BCI technology provides an alternative communication channel between the human brain (that does not depend on the brain’s normal output channels of the peripheral nerves and muscles) and a computer [13–21]. The three most commonly discussed diseases/injuries cited in the BCI literature as being a case of locked-in syndrome are ALS, high spinal cord injury and brain stem stroke [16,22–24].
• Patients suffering from ALS can undergo severe physical impairment due to the degeneration of nerve cells that control the voluntary muscles. In the later stages of ALS, the most basic human actions are affected, including speech, swallowing and breathing [25].
• Spinal cord injury (SCI) can result in damage to myelinated fiber tracts or the nerve roots that carry the signals to and from the brain [25]. In complete SCI, most of the motor functions and sensation below the neurological level are affected or completely lost [26]. SCI has a global annual incidence of 15–40 cases per million population [27] and less than 5% of people suffering from SCI recover locomotion [26].
• Brain stem stroke can be fatal, as the brain stem controls many of the basic and fundamental activities for life, such as breathing, heart rate, blood pressure, swallowing and eye movement [28]. People with severe brain stem stroke may also enter into a locked-in state and lose motor functions [29].
BCI (i.e., electroencephalography [EEG])-based communication produces new channels for controlling devices which would not be possible through the modes of communication that require eye movement or some muscle activity. Hans Berger performed a systematic study of the electrical activity of the human brain, and developed the EEG5. The first scientific literature referring to communication between the brain and the computer dates back to the early 1970s, and is due to Vidal [18], who suggested the feasibility of direct brain communication. To achieve this, the intent of the user must be extracted from the brain via the EEG or brain waves.
A typical BCI scheme generally consists of a data acquisition system, preprocessing of the acquired signals, the feature extraction process (FEP), classification of the features and finally the control interface and device controller, as shown in Figure 1.1. The EEG signals are acquired by mounting electrodes on the scalp of the user. These raw EEG signals have very low amplitude [30], very low signal-to-noise (SNR) ratio and considerable noise contamination. Preprocessing is carried out to obtain cleaner EEG signals by removing the unwanted components embedded in the EEG, which can considerably reduce the computational load on the rest of the BCI components.
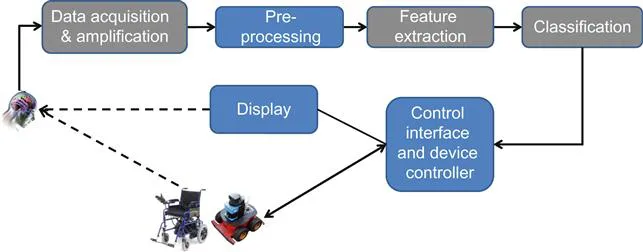
The work presented in this book has focused on the preprocessing stage for signal enhancement and extracting more motor imagery (MI)6 (mental imagination of movement) [31] related information from the acquired noisy EEG. These raw EEG signals are considered as a realization of a random or stochastic process [32]. When an accurate description of the signal is not available, a stochastic filter can be designed based on probabilistic measures. Therefore, the approach undertaken in this book is to use the concepts from quantum mechanics (QM) and the Schrodinger wave equation (SWE). A recurrent quantum neural network (RQNN) is constructed by using a layer of neurons within the neural network framework by computing a time-varying probability density function (pdf) of the noisy input signal (cf. Chapter 3). This pdf evolves recurrently under the influence of the SWE and helps to enhance the EEG (cf. Chapter 5).
Features are extracted from the filtered EEG. The classifier interprets these extracted features to categorize the input signal into a designated output class. The control interface or the graphical user interface (GUI) further interprets the classifier output in the form of a command to be sent to the controlled device. The GUI also provides appropriate feedback information to the BCI user [7], and can quicken the issuance of the command from the BCI user to the device that is controlled. A two-class BCI system has two output classes in the form of a left hand MI or a right hand/foot MI. But the task of maneuvering a mobile robot requires commands in the form of forward, left, right, backward and start/stop, using just the two-class information; i.e., there is very limited communication bandwidth. However, given the inherent higher accuracy compared to multi-class BCIs, this book focuses on utilizing a two-class BCI. This book proposes an intelligent, adaptive and user-centric interface design that plays a major role in compensating for the low bandwidth of a two-class BCI and simultaneously capitalizes on the intrinsic higher accuracy characteristic that is typical of a two-class BCI system (cf. Chapter 4 and Chapter 6).
In summary, this book outlines the recent developments in MI-based BCI, specifically focusing on reviewing the existing signal processing and classification methodologies, as well as different interface designs for a BCI system. It proposes an alternative nature-inspired information processing approach based on the concepts from QM, which is referred to as the RQNN model and is utilized for EEG signal enhancement (cf. Chapter 3 and Chapter 5). It also proposes an intelligent user interface design (cf. Chapter 4) which is customized to provide effective control of a wheelchair/mobile robot and a robot arm for a quicker communication process (cf. Chapter 6).
1.2 Rationale
BCI technology has not yet reached a critical level of acceptance even forty years after its inception. The challenges in this domain begin right at the stage of acquiring the EEG signals from the brain. An EEG is recorded non-invasively, so it is a mixture of the signal of interest from the activity of the underlying neural networks and an unknown amount of noise. Therefore, the raw signals need to be filtered in order to obtain cleaner EEG signals. Several groups work in the field of EEG filtering [19,33–39]. Most of their approaches involve subject-specific parameters, which, if tuned properly, can enhance the performance of an individual subject in terms of the classification accuracy (CA) [35,40]. However, these frequency-selective techniques lead to an unknown amount of loss of information from the acquired EEG signals [41,42]. Therefore, the frequency-selective EEG filtering methods pose challenges for long BCI setup and adaptability [43].
A major challenge in the area of EEG filtering is that the actual noise-free EEG is still unattainable. The work presented in this book addresses to some extent the very intriguing and challenging question of working towards a noise-free EEG, by relying heavily on the principles of QM to produce a time-varying pdf of the stochastic EEG signal, which evolves under the influence of the SWE to produce a cleaner EEG. It needs to be emphasized here that it can only be assumed that a cleaner EEG has been obtained if certain performance parameters (such as the CA of the BCI) are better than the unfiltered/raw EEG after performing the filtering process. Appropriate features or attributes [19,38,39,44–54] are obtained from the...
Table of contents
- Cover image
- Title page
- Table of Contents
- Copyright
- List of Figures
- List of Tables
- Preface
- Acknowledgments
- List of Acronyms
- Chapter 1. Introduction
- Chapter 2. Interfacing Brain and Machine
- Chapter 3. Fundamentals of Recurrent Quantum Neural Networks
- Chapter 4. The Proposed Graphical User Interface (GUI)
- Chapter 5. Recurrent Quantum Neural Network (RQNN)-Based EEG Enhancement
- Chapter 6. Graphical User Interface (GUI) and Robot Operation
- Chapter 7. Conclusion
- Appendix A. Understanding Evaluation Quantifiers for the Proposed Interface
- Bibliography
- Index
Frequently asked questions
Yes, you can cancel anytime from the Subscription tab in your account settings on the Perlego website. Your subscription will stay active until the end of your current billing period. Learn how to cancel your subscription
No, books cannot be downloaded as external files, such as PDFs, for use outside of Perlego. However, you can download books within the Perlego app for offline reading on mobile or tablet. Learn how to download books offline
Perlego offers two plans: Essential and Complete
- Essential is ideal for learners and professionals who enjoy exploring a wide range of subjects. Access the Essential Library with 800,000+ trusted titles and best-sellers across business, personal growth, and the humanities. Includes unlimited reading time and Standard Read Aloud voice.
- Complete: Perfect for advanced learners and researchers needing full, unrestricted access. Unlock 1.5M+ books across hundreds of subjects, including academic and specialized titles. The Complete Plan also includes advanced features like Premium Read Aloud and Research Assistant.
We are an online textbook subscription service, where you can get access to an entire online library for less than the price of a single book per month. With over 1.5 million books across 990+ topics, we’ve got you covered! Learn about our mission
Look out for the read-aloud symbol on your next book to see if you can listen to it. The read-aloud tool reads text aloud for you, highlighting the text as it is being read. You can pause it, speed it up and slow it down. Learn more about Read Aloud
Yes! You can use the Perlego app on both iOS and Android devices to read anytime, anywhere — even offline. Perfect for commutes or when you’re on the go.
Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app
Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app
Yes, you can access Brain-Computer Interfacing for Assistive Robotics by Vaibhav Gandhi in PDF and/or ePUB format, as well as other popular books in Informatik & Künstliche Intelligenz (KI) & Semantik. We have over 1.5 million books available in our catalogue for you to explore.