eBook - ePub
Flight Dynamics and System Identification for Modern Feedback Control
Avian-Inspired Robots
- 160 pages
- English
- ePUB (mobile friendly)
- Available on iOS & Android
eBook - ePub
Flight Dynamics and System Identification for Modern Feedback Control
Avian-Inspired Robots
About this book
Unmanned air vehicles are becoming increasingly popular alternatives for private applications which include, but are not limited to, fire fighting, search and rescue, atmospheric data collection, and crop surveys, to name a few. Among these vehicles are avian-inspired, flapping-wing designs, which are safe to operate near humans and are required to carry payloads while achieving manoeuverability and agility in low speed flight. Conventional methods and tools fall short of achieving the desired performance metrics and requirements of such craft. Flight dynamics and system identification for modern feedback control provides an in-depth study of the difficulties associated with achieving controlled performance in flapping-wing, avian-inspired flight, and a new model paradigm is derived using analytical and experimental methods, with which a controls designer may then apply familiar tools. This title consists of eight chapters and covers flapping-wing aircraft and flight dynamics, before looking at nonlinear, multibody modelling as well as flight testing and instrumentation. Later chapters examine system identification from flight test data, feedback control and linearization.
- Presents experimental flight data for validation and verification of modelled dynamics, thus illustrating the deficiencies and difficulties associated with modelling flapping-wing flight
- Derives a new flight dynamics model needed to model avian-inspired vehicles, based on nonlinear multibody dynamics
- Extracts aerodynamic models of flapping flight from experimental flight data and system identification techniques
Trusted by 375,005 students
Access to over 1.5 million titles for a fair monthly price.
Study more efficiently using our study tools.
Information
1
Introduction
Abstract:
This chapter introduces the reader to how ornithopters currently reside in our world, from where they were conceived, and where they are headed. First, the current design market for unmanned air vehicles is discussed, followed by the niche that ornithopters fill. Then current knowledge on the design, aerodynamics, vehicle dynamics, and feedback control is summarized. The chapter ends with defining a path for the contributions presented in this manuscript.
Key Words
state of the art
scope
contributions
1.1 Background and motivation
Unmanned air vehicles (UAVs), or aircraft without on-board pilots, are proliferating into many sectors of society and have the potential to significantly impact daily life. Enabled by advances in electronics miniaturization and composite material manufacturing, hobbyists, commercial companies, defense contractors, universities, and government research laboratories are currently developing small unmanned platforms. UAVs will play an important role in the future because in addition to the relatively low cost, they can un-man aircraft to perform “dull, dirty, and dangerous” work.
In the civilian sector, UAVs are currently used as toys, hobby aircraft, and research flight platforms. They have been employed in such tasks as airport wildlife control and population monitoring, and are expected to contribute to autonomous crop surveying, atmospheric weather monitoring, and search and rescue missions. In the military sector, these vehicles are employed in intelligence, surveillance, and reconnaissance missions. It is envisioned that these vehicles will perform missions such as chemical substance detection and autonomous perimeter surveillance, as well as achieve multi-mission capabilities including perch and stare, robust long-duration outdoor flight, and agile flight through cluttered indoor environments.
To accomplish such mission profiles autonomously, a flight control system, such as that shown Figure 1.1, must be implemented in order to stabilize the vehicle and achieve desired performance goals while attenuating the effects of noise, disturbances, and model uncertainty. The aircraft plant model contains a set of equations that evolve the vehicle position and velocity state variables as a function of the control inputs and disturbances. Sensors on board the aircraft provide measurements, which are used in an estimator to predict the aircraft state. The tracking error is supplied to the controller, which is designed to shape the inputs to achieve flight performance metrics.
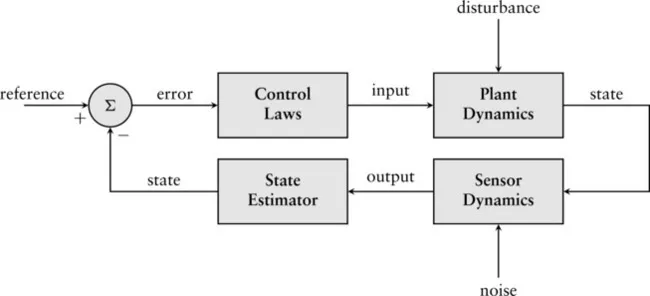
Figure 1.1 Flight control architecture block diagram
Fixed-wing aircraft remain the most prevalent type of UAV, as they are in general relatively simple aircraft and the dynamic models describing their motions are well known and understood [1, 2, 3]. However, as the vehicle size decreases and viscous effects become more pronounced, fixed-wing aircraft suffer from decreased lift to drag ratios that degrade flight performance [4]. Additionally, most fixed-wing aircraft require forward speed to generate aerodynamic forces, making it difficult for them to hover and fly slowly, which are abilities needed for indoor flight.
Miniature rotary-wing vehicles present an alternative to fixed-wing designs. These vehicles are highly maneuverable and have the ability to hover, making them suitable for indoor reconnaissance and surveillance missions; however, rotorcraft have a number of drawbacks. As with fixed-wing aircraft, viscous effects reduce the aerodynamic efficiency of the vehicle [5]. The added complexity of the rotor and swash plate systems increases the vehicle cost and maintenance. Furthermore, these aircraft are noisy, open-loop unstable, and potentially hazardous to bystanders and operators, making them difficult for human operators to fly without training and closed-loop control.
Although both conventional fixed-wing and rotary-wing vehicles fill niches in the design space of UAVs, a new vehicle design is needed to both fly in a robust manner outdoors and in an agile manner in cluttered environments.
1.2 Bio-inspired flapping wing aircraft
Miniature air vehicles that use flapping wings to generate aerodynamic forces and moments have advantages over both fixed-and rotary-wing vehicles. For vehicle sizes on the order of 0.1 kg and below, flapping wings are required to gain maneuverability and aerodynamic efficiency [6, 7, 8]. These vehicles are also safe for humans to operate, as they consist only of light weight material and do not have spinning rotors or fuel tanks, and they don a level of contextual camouflage due to the bird-like appearance. It is envisioned that by mimicking the agility, maneuverability, and robustness of natural flyers, such as insects, bats, and birds, these vehicles will fill the demand for multi-mission capable UAVs.
Avian flapping flight is characterized by the up stroke and the down stroke of the wings. A cross-section of a seagull wing in forward flight is illustrated in Figure 1.2, as viewed from a body-fixed reference frame [9]. Lift and drag forces are generated over the wing, perpendicular and parallel to the local flow direction, respectively, due to the forward motion of the vehicle and the plunging motion of the wing. During the down stroke, the resultant force is pointed such that a propulsive thrust force and a lift force are transmitted to the body, whereas the resultant force is oriented such that a lift force and a drag force are transmitted to the body during the up stroke. Typically the wing generates most of the lift force near the root of the wing, whereas the majority of the thrust is created on the outboard sections of the wing. Asymmetries between the up stroke and down stroke are required to produce a net lift and thrust force over the flapping cycle. Natural fliers achieve this effect either by flying with a positive mean angle of attack, modulating the up/down stroke ratio, or by changing the wing kinematics through wing morphing[10, 11].
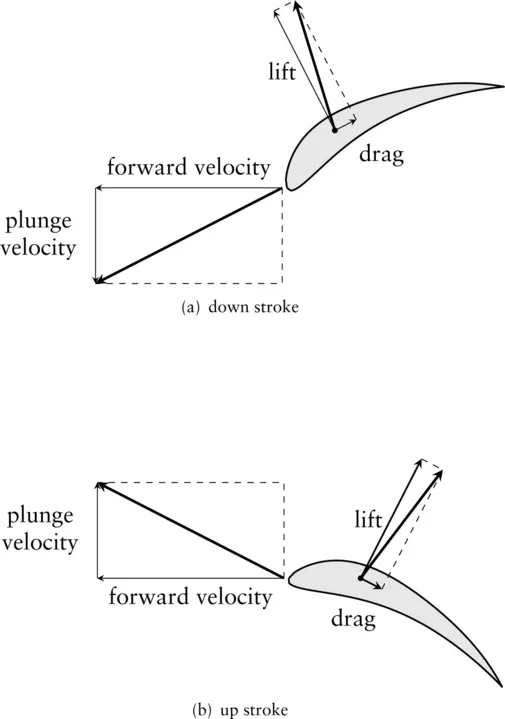
Figure 1.2 Forces acting on an avian wing section, as viewed from a body-fixed reference frame
1.3 Flapping-wing literature review
1.3.1 Vehicle design
The first recorded ornithopter vehicle design was da Vinci’s 1490 concept for a human-powered ornithopter, having membrane wings and a mechanically efficient transmission. In Germany during 1894, Lilienthal created the “Kleiner Schlagflügelapparat,” a human powered flapping device inspired by his previous glider work and experiments with birds. During the late 19th century designers began experimenting with new forms of power generation, including Trouvé’s 1870 flight powered by gunpowder charges and Hargrave’s steam-powered ornithopters in 1890. Beginning in 1942 with Schmid’s design, ornithopters were powered using internal c...
Table of contents
- Cover image
- Title page
- Table of Contents
- Copyright
- Dedication
- List of figures
- List of tables
- Nomenclature
- Preface
- About the authors
- Chapter 1: Introduction
- Chapter 2: Ornithopter test platform characterizations
- Chapter 3: Rigid multibody vehicle dynamics
- Chapter 4: System identification of aerodynamic models
- Chapter 5: Simulation results
- Chapter 6: Concluding remarks
- Appendix A: Field calibration of inertial measurement units
- Appendix B: Actuator dynamics system identification
- Appendix C: Equations of motion for single-body flight vehicles
- Appendix D: Linearization of a conventional aircraft model
- References
- Index
Frequently asked questions
Yes, you can cancel anytime from the Subscription tab in your account settings on the Perlego website. Your subscription will stay active until the end of your current billing period. Learn how to cancel your subscription
No, books cannot be downloaded as external files, such as PDFs, for use outside of Perlego. However, you can download books within the Perlego app for offline reading on mobile or tablet. Learn how to download books offline
Perlego offers two plans: Essential and Complete
- Essential is ideal for learners and professionals who enjoy exploring a wide range of subjects. Access the Essential Library with 800,000+ trusted titles and best-sellers across business, personal growth, and the humanities. Includes unlimited reading time and Standard Read Aloud voice.
- Complete: Perfect for advanced learners and researchers needing full, unrestricted access. Unlock 1.5M+ books across hundreds of subjects, including academic and specialized titles. The Complete Plan also includes advanced features like Premium Read Aloud and Research Assistant.
We are an online textbook subscription service, where you can get access to an entire online library for less than the price of a single book per month. With over 1.5 million books across 990+ topics, we’ve got you covered! Learn about our mission
Look out for the read-aloud symbol on your next book to see if you can listen to it. The read-aloud tool reads text aloud for you, highlighting the text as it is being read. You can pause it, speed it up and slow it down. Learn more about Read Aloud
Yes! You can use the Perlego app on both iOS and Android devices to read anytime, anywhere — even offline. Perfect for commutes or when you’re on the go.
Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app
Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app
Yes, you can access Flight Dynamics and System Identification for Modern Feedback Control by Jared A Grauer,James E Hubbard Jr. in PDF and/or ePUB format, as well as other popular books in Technology & Engineering & Aerodynamics. We have over 1.5 million books available in our catalogue for you to explore.