- 416 pages
- English
- ePUB (mobile friendly)
- Available on iOS & Android
eBook - ePub
About this book
This book provides a careful explanation of the basic areas of electronics and computer architecture, along with lots of examples, to demonstrate the interface, sensor design, programming and microcontroller peripheral setup necessary for embedded systems development. With no need for mechanical knowledge of robots, the book starts by demonstrating how to modify a simple radio-controlled car to create a basic robot. The fundamental electronics of the MSP430 are described, along with programming details in both C and assembly language, and full explanations of ports, timing, and data acquisition. Further chapters cover inexpensive ways to perform circuit simulation and prototyping.
Key features include:
- Thorough treatment of the MSP430's architecture and functionality along with detailed application-specific guidance
- Programming and the use of sensor technology to build an embedded system
- A learn-by-doing experience
With this book you will learn:
- The basic theory for electronics design
- Analog circuits
- Digital logic
- Computer arithmetic
- Microcontroller programming
- How to design and build a working robot
- Assembly language and C programming
- How to develop your own high-performance embedded systems application using an on-going robotics application
- Teaches how to develop your own high-performance embedded systems application using an on-going robotics application
- Thorough treatment of the MSP430's architecture and functionality along with detailed application-specific guidance
- Focuses on electronics, programming and the use of sensor technology to build an embedded system
- Covers assembly language and C programming
Trusted by 375,005 students
Access to over 1.5 million titles for a fair monthly price.
Study more efficiently using our study tools.
Information
Chapter 1
Introduction
Chapter Outline
Expected reader background
The parts of a robot
Where to get help
Tools you will need
Components
This is a book intended for individuals who are just getting started in electronics and microcontrollers, as well as individuals who have some experience and simply want to learn how to make an exciting robot out of a modified radio-controlled car and a low-power, but powerful, microcontroller. For those with experience, the first several chapters, which are a review of theory, can be skipped. For those just starting out, the best idea is to read the book through.
Expected reader background
To make good use of this material, the reader should have, at a minimum, knowledge of the following:
1. Mathematics up through algebra, preferably trigonometry
2. Some programming experience
3. Some soldering experience
4. A high-school physics course covering basic electromagnetics.
Individuals with this much experience should be able to follow the material in the book and should be able to successfully build the robots detailed in the book, particularly if following closely the example circuits and software. Naturally, additional background, particularly in circuit theory, will be helpful.
Before diving into how to build a robot, it’s important to define what we mean by the term. For example, is a radio-controlled (RC) car a robot? What about the mechanical arms that you see pictured in automobile factories, painting car panels or spot welding parts on the car?
For the purposes of this book, we’re going to narrow the scope of what people generally mean by the term robot. Here a robot is a mobile device, capable of moving autonomously but, perhaps, augmented with external commands. So an unmodified remote-controlled car that you can buy at the toy store is not a robot, since it can’t move autonomously. An automobile factory spot welder, although a robot in a more general context, is not what we’re talking about either, since it is mounted in place and is therefore not mobile.
The parts of a robot
The overall functions of a robot can be broken down into roughly four parts:
1. Locomotion
2. Control
3. Power source
4. Platform
Locomotion consists of the motors and wheels. Control consists of the electronics and software for sensing as well as the electronics and software for steering, motor control, etc. The power source is typically just the batteries or other source of energy. And the platform is the frame and other parts needed to hold the whole thing together.
Most books on robot building spend considerable time on the platform (building the frame, attaching motor and wheels, etc.) and on locomotion (sizing the motors, driving the wheels, mounting wheels to axles, etc.).
Now, consider how to build a robot inexpensively. The way robot building is often approached in books on the subject is to choose materials from which to build the frame, then build that frame, choose and purchase motors that are then mounted to this frame, etc., etc. Not only is this a long, drawn-out process, but it’s expensive, too. And the resulting robot may be slow-moving and not impressive.
In this book, we’ll take a different approach. We can purchase inexpensive, high-performance, already-built platforms, in the form of radio-controlled (RC) cars. These cars are available at lots of stores, they generally sell for around $20 to $30, and they often have rechargeable batteries. Thus, three of the four functions in the above list are already completed by taking this route. By substituting our own electronics (in the form of a microcontroller and associated hardware and software) we can transform this vehicle into a high-performance autonomous robot, capable of operating at high speeds, avoiding objects, tracking lines, etc. The end product is not only cheaper and easier to build, but it’s impressive as well.
So that leaves us with just the electronics and associated software to deal with. What are the functions that these electronics will have to perform to make this robot work? They include:
1. Motor drive – this includes the power transistors that route the battery current to the motor.
2. Steering drive – this includes the transistors that transfer the microcontroller’s commands to turn left or right.
3. Situational awareness – this is the collection of sensors and the sensor driver and receiver electronics that give the robot information about the environment in which it is operating.
Associated with each of these functions are also microcontroller operations. For example, the motor drive must be able to control not only whether current is being supplied to the motor but how much current is supplied, so that the speed of the robot is properly controlled. The steering drive command must be timed properly by the microcontroller so that, for example, the robot executes a desired 90 degree turn, not a 180 degree turn. For the situational awareness, there is considerable timing, data acquisition, and logic required of the microcontroller.
Along with the microcontroller software associated with each of these functions, there is a need for overall processing, coordination, and scheduling software. This is the software that determines when each of the functions are performed and how often they are repeated. It processes information from the sensors and, based on that information, determines what the next actions are that need to be taken by the motor and steering drives. The block diagram of Figure 1.1 illustrates this interaction between the different hardware and software functions.
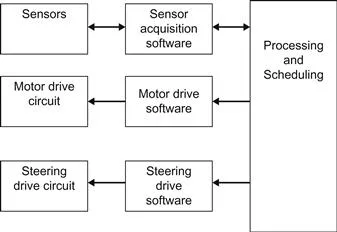
Figure 1.1 Robot hardware and software functions.
The design of these functions is what we’ll be looking at in this book. Along the way, you’ll learn how bipolar and MOSFET transistors work, what an analog filter does and how to design it, how to design a feedback amplifier and more. In addition, you’ll learn about digital electronics. This ...
Table of contents
- Cover image
- Title page
- Table of Contents
- Copyright
- Dedication
- Preface
- Chapter 1. Introduction
- Chapter 2. Mechanical and Electrical Disassembly of the RC Car
- Chapter 3. Beginning Electronics – Resistors, Capacitors, and Inductors
- Chapter 4. Basic Electronics – Semiconductors
- Chapter 5. DC Motors
- Chapter 6. Inexpensive Ways to Perform Circuit Simulation
- Chapter 7. Computer Logic
- Chapter 8. Computer Arithmetic
- Chapter 9. Introducing the MSP430 Microcontroller
- Chapter 10. Getting Started with MSP430 Assembler
- Chapter 11. Running Assembly Language Programs
- Chapter 12. Programming the MSP430 in C
- Chapter 13. System Clocking for the MSP430
- Chapter 14. Parallel and Serial Input/Output Ports
- Chapter 15. Timers and Counters
- Chapter 16. Data Acquisition
- Chapter 17. Circuit Building
- Chapter 18. Using Sensors to Avoid Collisions
- Chapter 19. Measuring Speed
- Chapter 20. Creating High Voltage
- Chapter 21. Remote Controls
- Chapter 22. Troubleshooting
- Chapter 23. Creating a Real-Time Operating System
- Chapter 24. Putting it all Together
- Appendix – Program Listing
- Index
Frequently asked questions
Yes, you can cancel anytime from the Subscription tab in your account settings on the Perlego website. Your subscription will stay active until the end of your current billing period. Learn how to cancel your subscription
No, books cannot be downloaded as external files, such as PDFs, for use outside of Perlego. However, you can download books within the Perlego app for offline reading on mobile or tablet. Learn how to download books offline
Perlego offers two plans: Essential and Complete
- Essential is ideal for learners and professionals who enjoy exploring a wide range of subjects. Access the Essential Library with 800,000+ trusted titles and best-sellers across business, personal growth, and the humanities. Includes unlimited reading time and Standard Read Aloud voice.
- Complete: Perfect for advanced learners and researchers needing full, unrestricted access. Unlock 1.5M+ books across hundreds of subjects, including academic and specialized titles. The Complete Plan also includes advanced features like Premium Read Aloud and Research Assistant.
We are an online textbook subscription service, where you can get access to an entire online library for less than the price of a single book per month. With over 1.5 million books across 990+ topics, we’ve got you covered! Learn about our mission
Look out for the read-aloud symbol on your next book to see if you can listen to it. The read-aloud tool reads text aloud for you, highlighting the text as it is being read. You can pause it, speed it up and slow it down. Learn more about Read Aloud
Yes! You can use the Perlego app on both iOS and Android devices to read anytime, anywhere — even offline. Perfect for commutes or when you’re on the go.
Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app
Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app
Yes, you can access MSP430-based Robot Applications by Dan Harres in PDF and/or ePUB format, as well as other popular books in Technology & Engineering & Artificial Intelligence (AI) & Semantics. We have over 1.5 million books available in our catalogue for you to explore.