eBook - ePub
Terramechanics and Off-Road Vehicle Engineering
Terrain Behaviour, Off-Road Vehicle Performance and Design
- 488 pages
- English
- ePUB (mobile friendly)
- Available on iOS & Android
eBook - ePub
Terramechanics and Off-Road Vehicle Engineering
Terrain Behaviour, Off-Road Vehicle Performance and Design
About this book
Terramechanics and Off-Road Vehicle Engineering will be of great interest to any professional engineer or automotive engineering student working on off-road vehicles. Reflecting the increase in off-road vehicle production and development—recreational, agricultural, construction, military—this book equips readers with all of the necessary knowledge to successfully design and model off-road vehicle systems, and provides a comprehensive introduction to terramechanics, the mechanics of vehicle/terrain interaction.
- The only book to cover the principles of off-road vehicle and terrain engineering, a rapidly developing sector that includes SUVs, tractors and agricultural vehicles, military vehicles, and construction equipment
- Covers the latest developments in the field, including the latest computer-aided methods employed in the development of new generation of high-mobility off-road vehicles in Europe, North America and Asia.
- Ideal for professional reference and course reference by students, with new detailed worked design examples, case studies, and accompanying problems and solutions.
Trusted by 375,005 students
Access to over 1.5 million titles for a fair monthly price.
Study more efficiently using our study tools.
Information
Chapter 1
Introduction
Man has a long history of involvement in off-road locomotion, perhaps since the invention of the wheel about 3500 BC. Powered off-road vehicles have come into wide use in many parts of the world in agriculture, construction, cross-country transportation and military operations since the turn of last century. In spite of rapid progress in technology, the development of cross-country vehicles has, for a long period of time, been guided by empiricism and the ‘cut and try’ methodology. Systematic studies of the principles underlying the rational development of off-road vehicles did not receive significant attention until the middle of the 20th century. The publication of Dr M.G. Bekker’s classic treatises, Theory of Land Locomotion in 1956 and Off-the-Road Locomotion and Introduction to Terrain–Vehicle Systems in the 1960s, stimulated a great deal of interest in the systematic development of the principles of land locomotion mechanics (Bekker, 1956, 1960, 1969). His pioneering work and unique contributions laid the foundation for a distinct branch of applied mechanics, which has now become known as ‘Terramechanics’.
In a broad sense, terramechanics is the study of the overall performance of a machine in relation to its operating environment – the terrain. It has two main branches: terrain–vehicle mechanics and terrain–implement mechanics. Terrain–vehicle mechanics is concerned with the tractive performance of a vehicle over unprepared terrain, ride quality over unprepared surfaces, handling, obstacle negotiation, water-crossing and other related topics. Terrain–implement mechanics, on the other hand, deals with the performance of terrain-working machinery, such as soil cultivating and earthmoving equipment.
The aim of terramechanics is to provide guiding principles for the rational development, design, and evaluation of off-road vehicles and terrain-working machinery. In recent years, the growing concern over energy conservation and environmental preservation has further stimulated the development of terramechanics. In addition to being a good engineering design in the traditional sense, an off-road machine is now expected to attain a high level of energy efficiency and not to cause undue damage to the operating environment, such as excessive soil compaction in agriculture. Increasing activity in the exploration and exploitation of natural resources in new frontiers, including remote areas and the seabed, and the growing demand for greater mobility over a wider range of terrains and in all seasons have also given much new impetus to the development of terramechanics.
Continuing interests of the USA, European Union and Russia, as well as programmes initiated by China, Japan, India and other nations, in the exploration of the Moon, Mars and beyond, have further stimulated advancements in terramechanics and its applications to the development of extraterrestrial vehicles, including manned and unmanned rovers (Wong and Asnani, 2008).
Terrain–vehicle mechanics is the prime subject of this book. It introduces the reader to the basic principles of terramechanics, which include the modelling of terrain behaviour, measurement and characterization of the mechanical properties of terrain pertinent to vehicle mobility, and the mechanics of vehicle–terrain interaction. As the performance of off-road vehicles over unprepared terrain constitutes a central issue in vehicle mobility, this book focuses on the study of vehicle–terrain interaction from the traction perspective. It provides the knowledge base for the prediction of off-road vehicle performance. Through examples, this book also demonstrates the applications of terramechanics to parametric analyses of terrain–vehicle systems and to the rational development and design of off-road vehicles from the traction perspective. The handling and ride of off-road vehicles are discussed in a separate book, Theory of Ground Vehicles (Wong, 2008).
1.1 Role of Terramechanics
The industries that manufacture and operate off-road equipment are multibillion dollar businesses. By considering the number of tractors and soil-cultivating implements used in agriculture, the number of earthmoving machines used in the construction industry, the number of off-highway trucks used in the off-road transport industry, and the number of combat and logistic vehicles used in the military, one can appreciate the scope for the applications of terramechanics.
Terramechanics, coupled with a systems analysis approach, can play a significant role in the development and evaluation of off-road equipment for a given mission and environment. Systems analysis is a methodology that provides a quantitative and systematic assessment of clearly defined issues and alternatives for decision makers. The knowledge of terramechanics can be applied, directly or indirectly, to the development, evaluation or selection of the following:
(a) vehicle concepts and configurations, defined in terms of form, size, weight and power;
(b) the running gear (or terrain-engaging elements) of a vehicle;
(c) the steering system of a vehicle;
(d) the suspension system of a vehicle;
(e) the power transmission and distribution system of a vehicle;
(f) the performance, handling and ride quality of a vehicle.
The role of terramechanics is illustrated in Figure 1.1.
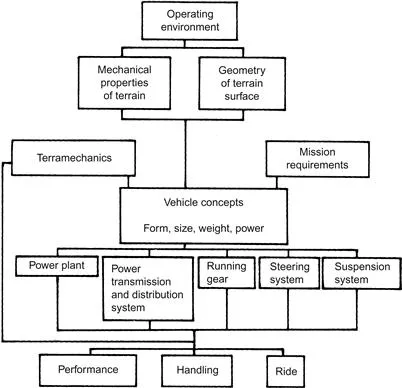
Figure 1.1 Role of terramechanics
There are many examples of the successful application of terramechanics and systems analysis methodology to the development and evaluation of off-road vehicles. One of the most striking examples is, perhaps, the development of the Lunar Roving Vehicle for the Apollo programmes under the guidance of Dr M.G. Bekker (1964, 1967, 1969, 1981). In a search for the optimum form of a vehicle for lunar surface exploration, walking machines, screw-driven vehicles, and a variety of tracked and wheeled vehicles were examined in detail (Asnani, Delap and Creager, 2009). Their performances were evaluated using the principles of terramechanics. The exhaustive studies led to the selection of a four-wheel vehicle with a unique type of tyre woven of steel wire and girded with titanium chevrons, as shown in Figure 1.2 (Cowart, 1971). It was found that this type of tyre produced optimum elasticity, traction, strength and durability with minimum weight, and was compatible with the vacuum and temperature extremes of the moon. This vehicle configuration was proved highly successful in operation on the lunar surface.
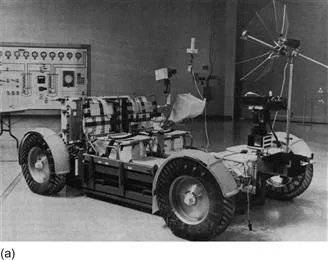
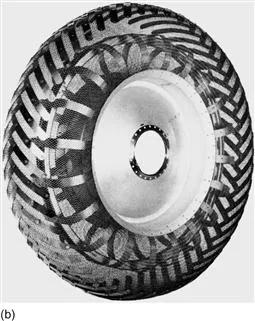
Figure 1.2 (a) The lunar roving vehicle for the Apollo missions, and (b) tyre woven of steel wire for the lunar roving vehicle (Reprinted by permission of the Council of the Institution of Mechanical Engineers from Cowart, 1971)
Another example of the application of terramechanics to the evaluation of terrain–vehicle systems was described by Sohne (1976) in connection with the studies of the optimum configuration for agricultural tractors. Based on the principles of terramechanics, he performed an analysis of the drawbar pull–slip characteristics and tractive efficiency of five configurations ranging from rear-wheel-drive with front-wheel-steering to six-wheel-drive with four-wheel-steering, as shown in Figure 1.3. Based on the results of the analysis, a comparison of the technical as well as economic performance of the various configurations was made. This type of analysis provides the designer with quantitative information upon which a rational decision may be made.
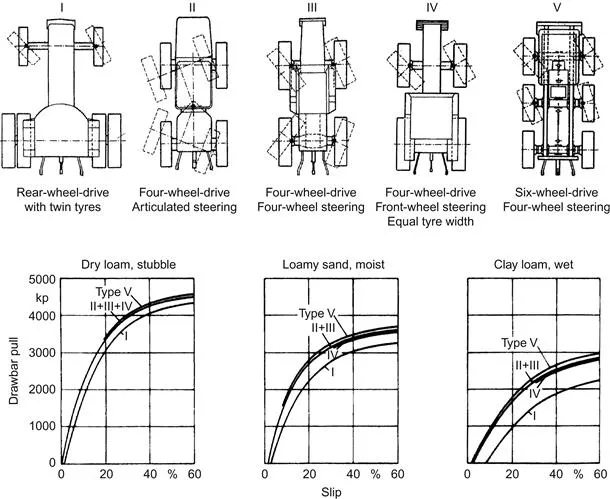
Figure 1.3 Comparison of various configurations for agricultural tractors (Reprinted by permission of ISTVS from Sohne, 1976)
More recent examples of the application of terramechanics principles and systems analysis methodology to the parametric evaluation of tracked vehicles were reported by Wong (1992a, 1995, 2007, 2008). Using a computer-aided method, known as NTVPM, the validity of which has been substantiated by field test data, the effects of tracked vehicle design on performance can be quantitive by evaluated.
Figure 1.4 shows the effects of the initial track tension coefficient (i.e. the ratio of initial track tension to vehicle weight) on the drawbar pull coefficient (i.e. the ratio of drawbar pull to vehicle weight) of three vehicle configurations on deep snow, designated as Hope Valley snow (Wong, 2007). The three tracked vehicle configurations Vehicle A, Vehicle A (6 W) and Vehicle A (8 W) with five, six and eight overlapping roadwheels, respectively, are shown in Figure 1.5. It shows that the initial track tension has a significant effect on soft ground mobility of tracked vehicles with different design configurations. This finding has led to the development of an innovative device—a central initial track tension regulating system. This remotely control device enables the driver to increase the initial track tension for improving vehicle mobility on soft ground. This is analogous to the central tyre inflation system for improving wheeled vehicle mobility. The central initial track tension regulating system has been installed in a new generation of military vehicles (Wong, 1995). Figure 1.6(a) and (b) show the effects of the location of the centre of gravity (CG) and track width on the drawbar pull coefficient of Vehicle A, respectively, on Hope Valley snow (Wong, 2007). The analytical framework and the basic features of NTVPM are described in Chapter 7.
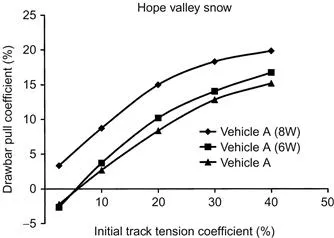
Figure 1.4 Variations of the drawbar pull coefficient with the initial track tension coefficient for the three vehicle configurations at 20% slip on Hope Valley snow, predicted by the computer-aided method NTVPM
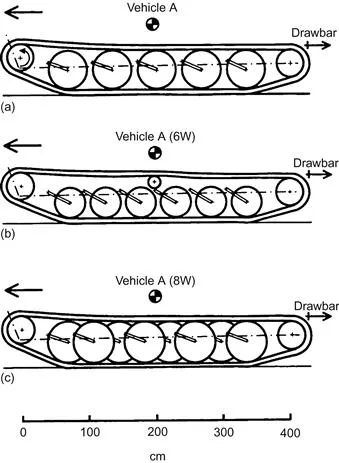
Figure 1.5 Schematic diagrams for the track–roadwheel systems of (a) Vehicle A, (b) Vehicle A (6 W) and (c) Vehicle A (8 W)
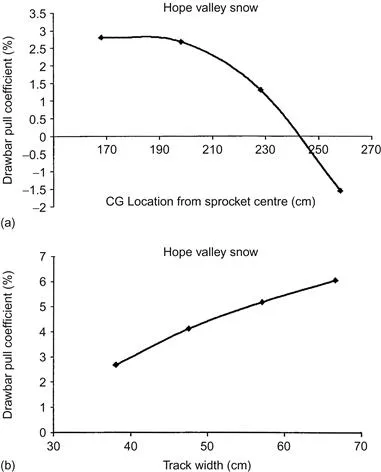
Figure 1.6 (a) Variation of the drawbar pull coefficient with the longitudinal location of the CG, and (b) variation of the drawbar pull coefficient with track width for Vehicle A at 20% slip on Hope Valley snow, predicted by the computer-aided method NTVPM
The computer-aided method NTVPM has been successfully used in the development of new products by off-road vehicle manufacturers and in the assessment of vehicle candidates from a procurement perspective for governmental agencies in Europe, North America, and Asia.
1.2 Some Basic Issues in Terramechanics
The study of the performance of a vehicle in relation to its operating environment – the terrain is a major focus in terramechanics. Accordingly, the mod...
Table of contents
- Cover Image
- Table of Contents
- Title
- Dedication
- Copyright
- Preface to the Second Edition
- Preface to the First Edition
- Conversion Factors
- Nomenclature
- Chapter 1. Introduction
- Chapter 2. Modelling of Terrain Behaviour
- Chapter 3. Measurement of Terrain Properties
- Chapter 4. Characterization of the Response of Terrains to Normal and Repetitive Loadings
- Chapter 5. Characterization of the Shearing Behaviour of Terrains
- Chapter 6. Performance of Off-Road Vehicles
- Chapter 7. Methods for Evaluating Tracked Vehicle Performance
- Chapter 8. Computer-Aided Method NTVPM for Evaluating the Performance of Vehicles with Flexible Tracks
- Chapter 9. Applications of the Computer-Aided Method NTVPM to Parametric Analysis of Vehicles with Flexible Tracks
- Chapter 10. Computer-Aided Method RTVPM for Evaluating the Performance of Vehicles with Long-Pitch Link Tracks
- Chapter 11. Methods for Evaluating Wheeled Vehicle Performance
- Chapter 12. Computer-Aided Method NWVPM for Evaluating the Performance of Tyres and Wheeled Vehicles
- References
- Index
Frequently asked questions
Yes, you can cancel anytime from the Subscription tab in your account settings on the Perlego website. Your subscription will stay active until the end of your current billing period. Learn how to cancel your subscription
No, books cannot be downloaded as external files, such as PDFs, for use outside of Perlego. However, you can download books within the Perlego app for offline reading on mobile or tablet. Learn how to download books offline
Perlego offers two plans: Essential and Complete
- Essential is ideal for learners and professionals who enjoy exploring a wide range of subjects. Access the Essential Library with 800,000+ trusted titles and best-sellers across business, personal growth, and the humanities. Includes unlimited reading time and Standard Read Aloud voice.
- Complete: Perfect for advanced learners and researchers needing full, unrestricted access. Unlock 1.5M+ books across hundreds of subjects, including academic and specialized titles. The Complete Plan also includes advanced features like Premium Read Aloud and Research Assistant.
We are an online textbook subscription service, where you can get access to an entire online library for less than the price of a single book per month. With over 1.5 million books across 990+ topics, we’ve got you covered! Learn about our mission
Look out for the read-aloud symbol on your next book to see if you can listen to it. The read-aloud tool reads text aloud for you, highlighting the text as it is being read. You can pause it, speed it up and slow it down. Learn more about Read Aloud
Yes! You can use the Perlego app on both iOS and Android devices to read anytime, anywhere — even offline. Perfect for commutes or when you’re on the go.
Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app
Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app
Yes, you can access Terramechanics and Off-Road Vehicle Engineering by J.Y. Wong in PDF and/or ePUB format, as well as other popular books in Technology & Engineering & Agronomy. We have over 1.5 million books available in our catalogue for you to explore.