- 259 pages
- English
- ePUB (mobile friendly)
- Available on iOS & Android
eBook - ePub
About this book
Observers are digital algorithms that combine sensor outputs with knowledge of the system to provide results superior to traditional structures, which rely wholly on sensors. Observers have been used in selected industries for years, but most books explain them with complex mathematics. Observers in Control Systems uses intuitive discussion, software experiments, and supporting analysis to explain the advantages and disadvantages of observers. If you are working in controls and want to improve your control systems, observers could be the technology you need and this book will give you a clear, thorough explanation of how they work and how to use them.
Control systems and devices have become the most essential part of nearly all mechanical systems, machines, devices and manufacturing systems throughout the world. Increasingly the efficiency of production, the reliability of output and increased energy savings are a direct result of the quality and deployment of the control system. A modern and essential tool within the engineer's kit is the Observer which helps improve the performance and reduce the cost of these systems.
George Ellis is the author of the highly successful Control System Design Guide (Second Edition). Unlike most controls books, which are written by control theorists and academics, Ellis is a leading engineer, designer, author and lecturer working in industry directly with the users of industrial motion control systems. Observers in Control Systems is written for all professional engineers and is designed to be utilized without an in-depth background in control theory. This is a "real-world" book which will demonstrate how observers work and how they can improve your control system. It also shows how observers operate when conditions are not ideal and teaches the reader how to quickly tune an observer in a working system.
Software Available online: A free updated and enhanced version of the author's popular Visual ModelQ allows the reader to practice the concepts with Visual ModelQ models on a PC. Based on a virtual laboratory, all key topics are demonstrated with more than twenty control system models. The models are written in Visual ModelQ ,and are available on the Internet to every reader with a PC.
- Teaches observers and Kalman filters from an intuitive perspective
- Explains how to reduce control system susceptibility to noise
- Shows how to design an adaptive controller based on estimating parameter variation using observers
- Shows how to improve a control system's ability to reject disturbances
- Key topics are demonstrated with PC-based models of control systems. The models are written in both MatLab® and ModelQ; models are available free of charge
Trusted by 375,005 students
Access to over 1.5 million titles for a fair monthly price.
Study more efficiently using our study tools.
Information
Chapter 1
Control Systems and the Role of Observers
In this chapter …
• Introduction to observer operation and benefits
• Summary of this book
1.1 Overview
Control systems are used to regulate an enormous variety of machines, products, and processes. They control quantities such as motion, temperature, heat flow, fluid flow, fluid pressure, tension, voltage, and current. Most concepts in control theory are based on having sensors to measure the quantity under control. In fact, control theory is often taught assuming the availability of near-perfect feedback signals. Unfortunately, such an assumption is often invalid. Physical sensors have shortcomings that can degrade a control system.
There are at least four common problems caused by sensors. First, sensors are expensive. Sensor cost can substantially raise the total cost of a control system. In many cases, the sensors and their associated cabling are among the most expensive components in the system. Second, sensors and their associated wiring reduce the reliability of control systems. Third, some signals are impractical to measure. The objects being measured may be inaccessible for such reasons as harsh environments and relative motion between the controller and the sensor (for example, when trying to measure the temperature of a motor rotor). Fourth, sensors usually induce significant errors such as stochastic noise, cyclical errors, and limited responsiveness.
Observers can be used to augment or replace sensors in a control system. Observers are algorithms that combine sensed signals with other knowledge of the control system to produce observed signals. These observed signals can be more accurate, less expensive to produce, and more reliable than sensed signals. Observers offer designers an inviting alternative to adding new sensors or upgrading existing ones.
This book is written as a guide for the selection and installation of observers in control systems. It will discuss practical aspects of observers such as how to tune an observer and what conditions make a system likely to benefit from their use. Of course, observers have practical shortcomings, many of which will be discussed here as well. Many books on observers give little weight to practical aspects of their use. Books on the subject often focus on mathematics to prove concepts that are rarely helpful to the working engineer. Here the author has minimized the mathematics while concentrating on intuitive approaches.
The author assumes that the typical reader is familiar with the use of traditional control systems, either from practical experience or from formal training. The nature of observers recommends that users be familiar with traditional (nonobserver-based) control systems in order to better recognize the benefits and shortcomings of observers. Observers offer important advantages: they can remove sensors, which reduces cost and improves reliability, and improve the quality of signals that come from the sensors, allowing performance enhancement. However, observers have disadvantages: they can be complicated to implement and they expend computational resources. Also, because observers form software control loops, they can become unstable under certain conditions. A person familiar with the application of control systems will be in a better position to evaluate where and how to use an observer.
The issues addressed in this book fall into two broad categories: design and implementation. Design issues are those issues related to the selection of observer techniques for a given product. How much will the observer improve performance? How much cost will it add? What are the limitations of observers? These issues will help the control-systems engineer in deciding whether an observer will be useful and in estimating the required resources. On the other hand, implementation issues are those issues related to the installation of observers. Examples include how to tune an observer and how to recognize the effects of changing system parameters on observer performance.
1.2 Preview of Observers
Observers work by combining knowledge of the plant, the power converter output, and the feedback device to extract a feedback signal that is superior to that which can be obtained by using a feedback device alone. An example from everyday life is when an experienced driver brings a car to a rapid stop. The driver combines knowledge of the applied stopping power (primarily measured through inertial forces acting on thedriver’s body) with prior knowledge of the car’s dynamic behavior during braking. An experienced driver knows how a car should react to braking force and uses that information to bring a car to a rapid but controlled stop.
The principle of an observer is that by combining a measured feedback signal with knowledge of the control-system components (primarily the plant and feedback system), the behavior of the plant can be known with greater precision than by using the feedback signal alone. As shown in Figure 1-1, the observer augments the sensor output and provides a feedback signal to the control laws.
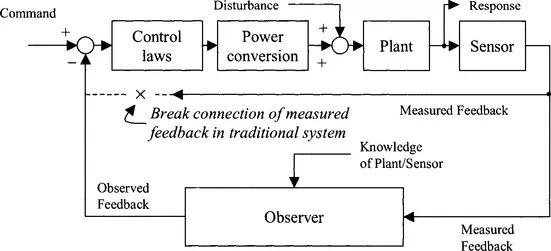
Figure 1-1 Role of an observer in a control system.
In some cases, the observer can be used to enhance system performance. It can be more accurate than sensors or can reduce the phase lag inherent in the sensor. Observers can also provide observed disturbance signals, which can be used to improve disturbance response. In other cases, observers can reduce system cost by augmenting the performance of a low-cost sensor so that the two together can provide performance equivalent to a higher cost sensor. In the extreme case, observers can eliminate a sensor altogether, reducing sensor cost and the associated wiring. For example, in a method called acceleration feedback, which will be discussed in Chapter 8, acceleration is observed using a position sensor and thus eliminating the need for a separate acceleration sensor.
Observer technology is not a panacea. Observers add complexity to the system and require computational resources. They may be less robust than physical sensors, especially when plant parameters change substantially during operation. Still, an observer applied with skill can bring substantial performance benefits and do so, in many cases, while reducing cost or increasing reliability.
Summary of the Book
This book is organized assuming that the reader has some familiarity with controls but understanding that working engineers and designers often benefit from review of the basics before taking up a new topic. Thus, the next two chapters will review control systems. Chapter 2 discusses practical aspects of control systems, seeking to build a common vocabulary and purpose between author and reader. Chapter 3 reviews the frequency domain and its application to control systems. The techniques here are discussed in detail assuming the reader has encountered them in the past but may not have practiced them recently.
Chapter 4 introduces the Luenberger observer structure, which will be the focus of this book. This chapter will build up the structure relying on an intuitive approach to the workings and benefits of observers. The chapter will demonstrate the key advantages of observers using numerous software experiments.
Chapters 5, 6, and 7 will discuss the behavior of observer-based systems in the presence of three common nonideal conditions.Chapter 5 deals with the effects of imperfect knowledge of model parameters, Chapter 6 deals with the effects of disturbances on observer-based systems, and Chapter 7 discusses the effects of noise, especially sensor noise, on observer-based systems.
Chapter 8 discusses the application of observer techniques to motion-control systems. Motion-control systems are unique among control systems, and the standard Luenberger observer is normally modified for those applications. The details of the necessary changes, and several applications, will be discussed.
Throughout this book, software experiments are used to demonstrate key points. A simulation environment,Visual ModelQ, developed by the author to aid those studying control systems, will be relied upon. More than two dozen models have been developed to demonstrate key points and all versions of Visual ModelQ can run them. Visit www.qxdesign.com to download a limited-capability version free of charge; detailed instructions on setting up and using Visual ModelQ aregiven in Chapter 2.
Readers wishing to contact the author are invited to do so. Write [email protected] or visit the Web site www.qxdesign.com. Your comments are most welcome. Also, visit www.qxdesign.com to review errata, which will be regularly updated by the author.
Chapter 2
Control-System Background
In this chapter …
• Common control-system structures
• Eight goals of control systems and implications of observer-based methods
• Instructions for downloading Visual ModelQ, a simulation environment that is used throughout this book
• Introductory Visual ModelQ software experiments
2.1 Control-System Structures
The basic control loop includes four elements: a control law, a power converter, a plant, and a feedback sensor. Figure 2-1 shows the typical interconnection of these functions. The command is compared to the feedback signal to gene...
Table of contents
- Cover image
- Title page
- Table of Contents
- Copyright
- Dedication
- Acknowledgments
- Safety
- Chapter 1: Control Systems and the Role of Observers
- Chapter 2: Control-System Background
- Chapter 3: Review of the Frequency Domain
- Chapter 4: The Luenberger Observer: Correcting Sensor Problems
- Chapter 5: The Luenberger Observer and Model Inaccuracy
- Chapter 6: The Luenberger Observer and Disturbances
- Chapter 7: Noise in the Luenberger Observer
- Chapter 8: Using the Luenberger Observer in Motion Control
- References
- Appendix A: Observer-Based Resolver Conversion in Industrial Servo Systems
- Appendix B: Cures for Mechanical Resonance in Industrial Servo Systems
- Appendix C: European Symbols for Block Diagrams
- Appendix D: Development of the Bilinear Transformation
- Appendix E: Solutions to Exercises
- Index
Frequently asked questions
Yes, you can cancel anytime from the Subscription tab in your account settings on the Perlego website. Your subscription will stay active until the end of your current billing period. Learn how to cancel your subscription
No, books cannot be downloaded as external files, such as PDFs, for use outside of Perlego. However, you can download books within the Perlego app for offline reading on mobile or tablet. Learn how to download books offline
Perlego offers two plans: Essential and Complete
- Essential is ideal for learners and professionals who enjoy exploring a wide range of subjects. Access the Essential Library with 800,000+ trusted titles and best-sellers across business, personal growth, and the humanities. Includes unlimited reading time and Standard Read Aloud voice.
- Complete: Perfect for advanced learners and researchers needing full, unrestricted access. Unlock 1.5M+ books across hundreds of subjects, including academic and specialized titles. The Complete Plan also includes advanced features like Premium Read Aloud and Research Assistant.
We are an online textbook subscription service, where you can get access to an entire online library for less than the price of a single book per month. With over 1.5 million books across 990+ topics, we’ve got you covered! Learn about our mission
Look out for the read-aloud symbol on your next book to see if you can listen to it. The read-aloud tool reads text aloud for you, highlighting the text as it is being read. You can pause it, speed it up and slow it down. Learn more about Read Aloud
Yes! You can use the Perlego app on both iOS and Android devices to read anytime, anywhere — even offline. Perfect for commutes or when you’re on the go.
Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app
Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app
Yes, you can access Observers in Control Systems by George Ellis in PDF and/or ePUB format, as well as other popular books in Technology & Engineering & Mechanical Engineering. We have over 1.5 million books available in our catalogue for you to explore.