The ultimate goal of this paper is to control the angular speed, in a model of a DC motor driving an inertial load has the angular speed, as the output and applied voltage, as the input, by varying the applied voltage using different control strategies for comparison purpose. The comparison is made between the proportional controller, integral controller, proportional and integral controller, phase lag compensator, derivative controller, lead integral compensator, lead lag compensator, PID controller and the linear quadratic tracker design based on the optimal control theory. It has been realized that the design based on the linear quadratic tracker will give the best steady state and transient system behavior, mainly because, the other compensator designs are mostly based on trial and error while the linear quadratic tracker design is based on the optimal control theory which can give best dynamic performance for the controlled system.
- 20 pages
- English
- ePUB (mobile friendly)
- Available on iOS & Android
eBook - ePub
Control of DC Motor Using Different Control Strategies
About this book
Trusted by 375,005 students
Access to over 1.5 million titles for a fair monthly price.
Study more efficiently using our study tools.
Information
Subtopic
Ingegneria meccanica1. Introduction
The term control system design refers to the process of selecting feedback gains that meet design specifications in a closed-loop control system. Most design methods are iterative, combining parameter selection with analysis, simulation, and insight into the dynamics of the plant. Ref [3] covered how it is possible to improve the system performance, along with various examples of the technique for applying casecade and feedback compensators, using the methodes root locus and frequency response. It also covered some methods of optimal linear system design and presentation of eigenvalues assignments for MIMO system by state feedback. In [2] and [4], good descrbtion of the optimat control design, including llinear state regulator control, the output regulator control and linear quadratic tracker
The matlab SISO Design Tool [1] can be used to design compensators by root locus, Bode diagram, and Nichols plot design techniques, and to analyze the resulting designs. In addition to the SISO Design Tool in Matlab, the Control System Toolbox [2]
provides a set of commands that you can use for a broader range of control applications, including Classical SISO design Modern and MIMO design techniques, such as pole placement and linear quadratic Gaussian (LQG) methods
A simple model of a DC motor driving an inertial load has the angular speed of the load, , as the output and applied voltage, , as the input. The system was used as an example in [1]. The ultimate goal of this paper is to control the angular rate by varying the applied voltage using different control strategies for comparison purpose. The comparision is made between the proptional controller, integral controller, propotional and integral controller, phase lag compensator, derivitive controller, lead integral compensator, lead lag compensator, PID controller and the the linear quadratic tracker design based on the optimal control theory.
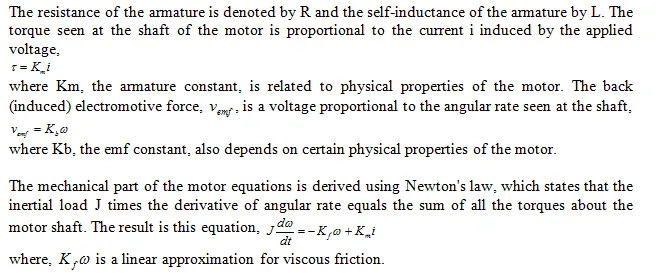
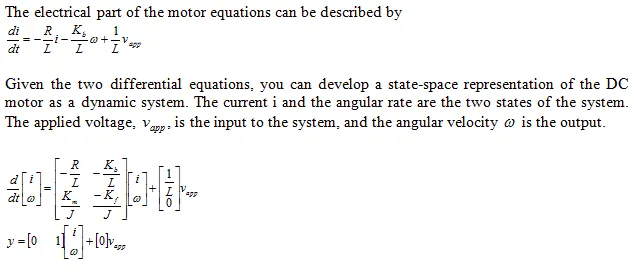
2. Mathematical model of a DC motor
3. Controlling DC Motor Angular Velocity through Different Compensation Techniques:
In this paper the DC motor m...
Table of contents
- Control of DC Motor Using Different Control Strategies
- Abstract
- 1. Introduction
- 2. Mathematical model of a DC motor
- 3. Controlling DC Motor Angular Velocity through Different Compensation Techniques:
- 5. Conclusion:
- 7. References
Frequently asked questions
Yes, you can cancel anytime from the Subscription tab in your account settings on the Perlego website. Your subscription will stay active until the end of your current billing period. Learn how to cancel your subscription
No, books cannot be downloaded as external files, such as PDFs, for use outside of Perlego. However, you can download books within the Perlego app for offline reading on mobile or tablet. Learn how to download books offline
Perlego offers two plans: Essential and Complete
- Essential is ideal for learners and professionals who enjoy exploring a wide range of subjects. Access the Essential Library with 800,000+ trusted titles and best-sellers across business, personal growth, and the humanities. Includes unlimited reading time and Standard Read Aloud voice.
- Complete: Perfect for advanced learners and researchers needing full, unrestricted access. Unlock 1.5M+ books across hundreds of subjects, including academic and specialized titles. The Complete Plan also includes advanced features like Premium Read Aloud and Research Assistant.
We are an online textbook subscription service, where you can get access to an entire online library for less than the price of a single book per month. With over 1.5 million books across 990+ topics, we’ve got you covered! Learn about our mission
Look out for the read-aloud symbol on your next book to see if you can listen to it. The read-aloud tool reads text aloud for you, highlighting the text as it is being read. You can pause it, speed it up and slow it down. Learn more about Read Aloud
Yes! You can use the Perlego app on both iOS and Android devices to read anytime, anywhere — even offline. Perfect for commutes or when you’re on the go.
Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app
Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app
Yes, you can access Control of DC Motor Using Different Control Strategies by Dr. Hidaia Mahmood Alassouli in PDF and/or ePUB format, as well as other popular books in Tecnologia e ingegneria & Ingegneria meccanica. We have over 1.5 million books available in our catalogue for you to explore.