Classical Feedback Control with Nonlinear Multi-Loop Systems describes the design of high-performance feedback control systems, emphasizing the frequency-domain approach widely used in practical engineering. It presents design methods for high-order nonlinear single- and multi-loop controllers with efficient analog and digital implementations. Bode integrals are employed to estimate the available system performance and to determine the ideal frequency responses that maximize the disturbance rejection and feedback bandwidth. Nonlinear dynamic compensators provide global stability and improve transient responses. This book serves as a unique text for an advanced course in control system engineering, and as a valuable reference for practicing engineers competing in today's industrial environment.
eBook - ePub
Classical Feedback Control with Nonlinear Multi-Loop Systems
With MATLAB® and Simulink®, Third Edition
- 574 pages
- English
- ePUB (mobile friendly)
- Available on iOS & Android
eBook - ePub
Classical Feedback Control with Nonlinear Multi-Loop Systems
With MATLAB® and Simulink®, Third Edition
About this book
Trusted by 375,005 students
Access to over 1.5 million titles for a fair monthly price.
Study more efficiently using our study tools.
Information
1
Feedback and Sensitivity
Chapter 1 introduces the basics of feedback control. The purpose of feedback is to make the output insensitive to plant parameter variations and disturbances. Negative, positive, and large feedback are defined and discussed along with sensitivity and disturbance rejection. The notions of frequency response, the Nyquist diagram, and the Nichols chart are introduced. (The Nyquist stability criterion is presented in Chapter 3.)
Feedback control and block diagram algebra are explained at an elementary level in Appendix 1, which can be used as an introduction to this chapter. Laplace transfer functions are described in Appendix 2.
1.1 Feedback Control System
It is best to begin with an example. Figure 1.1a depicts a servomechanism regulating the elevation of an antenna. Figure 1.1b shows a block diagram for this control system made of cascaded elements, i.e., links. The capital letters stand for the signals’ Laplace transforms and also for the transfer functions of the linear links.
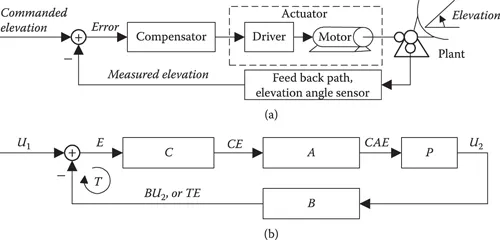
FIGURE 1.1
Single-loop feedback system.
Single-loop feedback system.
There is one input command U 1, which is the commanded elevation angle, and just one output U 2, which is the actual elevation of the antenna, so the system is said to be single-input single-output (SISO). Evidently there is one feedback loop, and so the system is also referred to as single-loop.
The feedback path contains some sort of sensor for the output variable and has the transfer function B. Ideally, the measured output value BU 2 equals the commanded value U 1, and the error E = U 1 – BU 2, at the output of the summer, is zero. In practice, most of the time the error is nonzero but small.
The error is amplified by the compensator C and applied to the actuator A, in this case a motor regulator (driver) and a motor, respectively. The motor rotates the plant P, the antenna itself, which is the object of the control. The compensator, actuator, and plant make up the forward path with the transfer function CAP.
The return signal, which goes into the summer from the feedback path, is BU 2 = TE, where the product T = CAPB = BU 2/E, is called the loop transfer function or the return ratio.
The output of the summer is:
| (1.1) |
so that the error can be expressed as
| (1.2) |
where F = T + 1 is the return difference. Its magnitude |F| is the feedback. It is seen that when the feedback is large, the error is small.
If the feedback path was not present, the output U 2 would simply equal the product CAPU 1, and the system would be referred to as open-loop.
Example 1.1
A servomechanism for steering a toy car (using wires) is shown in Figure 1.2. The command voltage U 1 is regulated by a joystick potentiometer. Another identical potentiometer (angle sensor) placed on the shaft of the motor produces voltage U angle proportional to the shaft rotation angle. The feedback makes the error small, so that the sensor voltage approximates the input voltage, and therefore the motor shaft angle tracks the joystick-commanded angle.

FIGURE 1.2
Joystick control of a steering mechanism.
Joystick control of a steering mechanism.
This arrangement of a motor with an angle sensor is often called servomotor, or simply servo. Similar servos are used for animation purposes in movie production.
The system of regulating aircraft-control surfaces using joysticks and servos was termed “fly by wire” when it was first introduced to replace bulky mechanical gears and cables. The required high reliability was achieved by using four independent parallel analog electrical circuits.
The telecommunication link between the control box and the servo can certainly also be wireless.
Example 1.2
A phase-locked loop (PLL) is shown in Figure 1.3. The plant here is a voltage-controlled oscillator (VCO).

FIGURE 1.3
Phase-locked loop.
Phase-locked loop.
The VCO is an ac generator whose frequency is proportional to the voltage applied ...
Table of contents
- Cover
- Half-Title
- Series
- Title
- Copyright
- Contents
- Preface
- To Instructors
- Authors
- 1 Feedback and Sensitivity
- 2 Feedforward, Multi-Loop, and MIMO Systems
- 3 Frequency Response Methods
- 4 Shaping the Loop Frequency Response
- 5 Compensator Design
- 6 Analog Controller Implementation
- 7 Linear Links and System Simulation
- 8 Introduction to Alternative Methods of Controller Design
- 9 Adaptive Systems
- 10 Provision of Global Stability
- 11 Describing Functions
- 12 Process Instability
- 13 Multiwindow Controllers
- 14 Nonlinear Multi-Loop Systems with Uncertainty
- Appendix 1: Feedback Control, Elementary Treatment
- Appendix 2: Frequency Responses
- Appendix 3: Causal Systems, Passive Systems and Positive Real Functions, and Collocated Control
- Appendix 4: Derivation of Bode Integrals
- Appendix 5: Program for Phase Calculation
- Appendix 6: Generic Single-Loop Feedback System
- Appendix 7: Effect of Feedback on Mobility
- Appendix 8: Regulation
- Appendix 9: Balanced Bridge Feedback
- Appendix 10: Phase-Gain Relation for Describing Functions
- Appendix 11: Discussions
- Appendix 12: Design Sequence
- Appendix 13: Examples
- Appendix 14: Bode Step Toolbox
- Appendix 15: Nonlinear Multi-Loop Feedback Control (Patent Application)
- Bibliography
- Notation
- Index
Frequently asked questions
Yes, you can cancel anytime from the Subscription tab in your account settings on the Perlego website. Your subscription will stay active until the end of your current billing period. Learn how to cancel your subscription
No, books cannot be downloaded as external files, such as PDFs, for use outside of Perlego. However, you can download books within the Perlego app for offline reading on mobile or tablet. Learn how to download books offline
Perlego offers two plans: Essential and Complete
- Essential is ideal for learners and professionals who enjoy exploring a wide range of subjects. Access the Essential Library with 800,000+ trusted titles and best-sellers across business, personal growth, and the humanities. Includes unlimited reading time and Standard Read Aloud voice.
- Complete: Perfect for advanced learners and researchers needing full, unrestricted access. Unlock 1.5M+ books across hundreds of subjects, including academic and specialized titles. The Complete Plan also includes advanced features like Premium Read Aloud and Research Assistant.
We are an online textbook subscription service, where you can get access to an entire online library for less than the price of a single book per month. With over 1.5 million books across 990+ topics, we’ve got you covered! Learn about our mission
Look out for the read-aloud symbol on your next book to see if you can listen to it. The read-aloud tool reads text aloud for you, highlighting the text as it is being read. You can pause it, speed it up and slow it down. Learn more about Read Aloud
Yes! You can use the Perlego app on both iOS and Android devices to read anytime, anywhere — even offline. Perfect for commutes or when you’re on the go.
Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app
Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app
Yes, you can access Classical Feedback Control with Nonlinear Multi-Loop Systems by Boris J. Lurie,Paul Enright in PDF and/or ePUB format, as well as other popular books in Technology & Engineering & Mechanics. We have over 1.5 million books available in our catalogue for you to explore.