Global Navigation Satellite Systems (GNSS) and their associated technologies have advanced by leaps and bounds in the nine years since the first edition of this book was published. The concept of survey has changed, especially in the disciplines of geomatics and geoinformatics. This revised and updated second edition provides a thorough understanding of the basic principles and techniques of GNSS, analyzes all four active systems, and explains clearly how each of these systems works. Because of its straightforward treatment of the subject, readers will gain an insight into the techniques, trends, and applications of GNSS and develop knowledge on selecting an appropriate GNSS instrument. Written for students and practitioners in geoinformatics, geomatics engineering, surveying, and remote sensing and GIS, this introductory and practical book includes questions and exercises in each chapter.
Key Features:
• Furnishes detailed information on GPS, GLONASS, Galileo, BeiDou, and other regional and augmented systems • Provides practical guidance for surveying, mapping, and navigation with GNSS • Sheds light on the latest developments and modern trends of GNSS • Includes a detailed glossary of related terms • Contains many illustrations that complement the text • Exercises for each chapter • MCQ, solution manual for mathematical problems, and PPT as online resources
Trusted by 375,005 students
Access to over 1.5 million titles for a fair monthly price.
Global Navigation Satellite System (GNSS) is a satellite-based navigation and positioning system that provides autonomous spatial positioning. A GNSS allows a small electronic receiver to determine its location using signals transmitted from navigation satellites. For anyone with a GNSS receiver, the system can provide location (and time) information in all weather conditions, day or night, anywhere in the world. Currently, four GNSS constellations are in operation with global coverage. Other than these, some regional or local systems are also available.
Nowadays, all of us carry one or more GNSS receivers in our smartphones or smartwatches. Equipped with these receivers, users can accurately locate where they are and can easily navigate to where they want to go, whether walking, driving, flying, or sailing. GNSS has become a mainstay of transportation systems worldwide, providing navigation for aviation, ground, and maritime operations. Disaster relief and emergency services also depend upon GNSS for location and timing capabilities in their life-saving missions. Activities such as banking, mobile phone operations, and even the control of power grids, are facilitated every day by the accurate timing provided by GNSS. Engineers, surveyors, geologists, geographers, and various professionals can perform their work more efficiently, safely, economically, and accurately using GNSS technology.
1.2 Definition of GNSS
The applications of GNSS for positioning, navigation, and timing services are enormous; as a result, different definitions of GNSS can be found in the existing literature. We have yet to come up with a commonly accepted and actionable definition of GNSS (Swider 2005). Swider (2005) defined GNSS as:
GNSS collectively refers to the worldwide civil positioning, navigation, and timing determination capabilities available from one or more satellite constellations.
The International Civil Aviation Organization (ICAO 2005) defines GNSS as:
GNSS is a worldwide position and time determination system that includes one or more satellite constellations, aircraft receivers, system integrity monitoring augmented as necessary to support the required navigation performance for the intended operation.
Another simple definition is:
GNSS is a satellite-based system that is used to pinpoint the geographic location of a user’s receiver anywhere in the world.
The above definition is short, simple, and memorable; however, it is technologically weak. A better definition of GNSS is:
GNSS is a system consisting of a network of navigation satellites monitored and controlled by ground stations on the earth, which continuously transmit radio signals that are captured by the receivers to process, thus making it possible to precisely geolocate the receiver by measuring distances from the satellites and to provide precise time information anywhere in the world at any time.
Geolocation refers to identifying the real-world geographic location of a GNSS receiver.
1.3 Navigation and Positioning
Navigation is the process of planning, reading, and controlling the movement of a craft, vehicle, person, or object from one place to another (Bowditch 1995). In GNSS literature, the act of determining the course or heading of movement is also called navigation. The word navigate is derived from the Latin roots navis, meaning ‘a ship’, and agere, meaning ‘to move’, or ‘to drive’, the art and science of conducting a craft as it moves about its ways (Richey 2007). The word ‘navigation’ perhaps was originally used by the mariners. All navigational techniques involve locating the navigator’s position compared to known locations or patterns. Most modern navigation relies primarily on positions determined electronically by receivers collecting information from satellites.
Positioning is a process used to determine the location of one position relative to other defined positions. Obtaining locations in real-time, (i.e., with no delay between appearance in a location and availability of positional information about the very same location) is known as real-time positioning. The word positioning, in the GNSS community, is commonly used to refer to ‘finding the position’ rather than ‘getting into the position’. Therefore, positioning may include not just the location, but also the bearing (direction) of the positioned object. A positioning system determines the location of an object in space, thus, also referred to as spatial positioning. Spatial means ‘having to do with space’, or ‘related to space’. Since GNSS deals with positioning in a geographic sense or in terms of geographic coordinates, the word ‘positioning’ is also referred to as geospatial positioning.
1.4 Points of Reference
A reference point (also known as control point in surveying) is a location used to determine (or express) the location or position of another one, by giving the relative position. To determine the location of one object we need to refer to reference points or locations of other objects. For example, to define the location of a glass, one might say ‘on the table’; hence the table is a reference point which has a location. In this example, however, the position of the glass is not very precise. One may ask ‘where on the table?’ Therefore, for precise determination of position, we need to adopt a geometrical approach like, ‘30 cm from left edge of the table, 20 cm from front edge of the table, and on top of the table’; and thus, it defines the exact position.
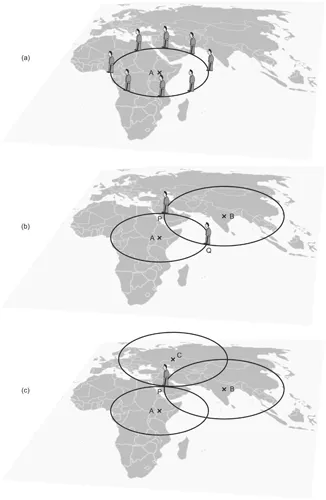
From the preceding discussion, it is clear that we need to use references to determine the position of objects. But how many references do we need? Let us start with a single reference point. Assume that a tower is installed at a known point, A, on the earth (Figure 1.1a). We are somewhere at a distance of 5 km from A. This does not tell us where we are, but it narrows our position to a point on the circle with the radius of 5 km from the tower, as shown in Figure 1.1a. It can be said that we are anywhere on the circumference of this circle.
Next, let us assume that a second tower is installed at another known point, B, on the earth. We are at a distance of 7 km from B. This tells us that we are somewhere on a circle with the radius of 7 km from the tower B. We now have two pieces of information: our distance to point A is 5 km and our distance to point B is 7 km. So, we are on circle A and circle B at the same time. Therefore, we must be at the intersection of the two circles, one of the two points P or Q, as shown in Figure 1.1b.
Measuring our distance to a third tower C, in the same manner, would identify exactly where we are. Figure 1.1c shows that we must be at the point P, where three circles intersect. This process of determining one’s location with the distance measured from three reference points located on the ground is known as two-dimensional trilateration (refer to Chapter 3, Section 3.5). However, this is a case for determining two-dimensional (2D) position, where we need at least three reference points. In this example, we have assumed that we are on the earth’s surface. Therefore, the surface of the earth would act as an additional reference. But, if we are at some height from the earth’s surface, we need at least four reference points for determining three-dimensional (3D) locations.
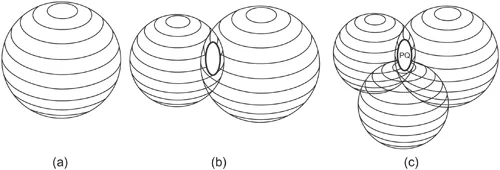
Suppose we measure our distance from a point and find it to be 10 km. Knowing that we are 10 km from a particular point narrows down all the possible locations we could be in the whole universe to the surface of a sphere that is centred on this point and has a radius of 10 km (Figure 1.2a). Next, let us say we measure our distance to a second point and find out that it is 11 km away. This conveys that we are not only on the first sphere but we are also on a sphere that has an 11 km radius centred at the second point. In other words, we are somewhere where these two spheres intersect. Such an intersection is indeed a circle (Figure 1.2b). If we then make a measurement from a third reference point and find that we are 12 km from that one, our position is narrowed down even further to the two points (P and Q as shown in Figure 1.2c) where the 12 km sphere cuts through the circle that is the intersection of the first two spheres. So, by ranging from three reference points we can narrow down our position to just two points in the space.
FIGURE 1.2 Principle of 3D positioning: (a) distance measurement from one reference point establishes position on a sphere; (b) distance measurement from two reference points establishes circle of intersection of two spheres; (c) distance measurement from three reference points narrows position to only two positions (P and Q).
Even though there are two possible positions, they differ greatly in their location. However, by adding a fourth reference point, we can determine our precise three-dimensional position. Let us say our distance from a fourth point is 15 km. Now, we have a fourth sphere intersecting the first three spheres at one common point, and this is the precise location. This technique is known as 3D trilateration.
In summary, we need points of reference to determine or define the location or position of any object. At least three reference points are required to define 2D position and four are needed to define positions in 3D. However, it is worth mentioning that GNSS can determine 3D positions with reference to only three points by means of mathematical and geometrical tricks (discussed in Chapter 3, Section 3.5).
1.5 History of Navigation Systems
Where are we? How do we get to our destination? These questions are as old as the history of mankind. The long history of navigation and positioning and the myriad of techniques and instruments humans used in these efforts are beyond the scope of this book. However, the following sections briefly describe the evolution of navigation and positioning with important breakthroughs.
1.5.1 The Celestial Age
Identifying and remembering objects and landmarks as points of reference was how early humans used to find their way through jungles and deserts. Leaving stones, marking trees, referencing mountains were the early navigational aids. Stones, trees, and mountains were the early examples of ‘points of reference’. Today, we still use the same concept for positioning and navigation on the land—often, we use several landmarks for our daily navigational purpose.
Identifying points of reference was easy on land. But it became a matter of life and survival when man started to explore the oceans, where the only visible objects were the Sun, the Moon, and the stars. Naturally, they became the ‘points of reference’ and the era of celestial navigation began. Celestial navigation and positioning was the first serious solution to the problem of finding one’s position in unknown territories, where the Sun, the Moon, and stars were used as points of reference. Celestial navigation is the process where angles between objects in the sky (celestial objects) and the horizon were used to locate one’s position on the earth. At any given instant of time, any celestial object (e.g., the Sun, the Moon, or stars) can be located directly over a particular geographic position on the earth. This geographic position (on the earth’s surface) is known as the celestial object’s subpoint, and its location (e.g., its latitude and longitude) can be determined by referring to tables in a nautical almanac or air almanac (Bowditch 1995).
NOTE
An almanac is an annual publication containing tabular information in a particular field or fields often arranged according to the calendar. Astronomical data and various statistics are also found in almanacs, such as the times of the rising and setting of the Sun and Moon, eclipses, hours of full tide, stated festivals of churches, terms of courts, lists of all types, timelines, and many more.
A nautical almanac is a publication describing the positions and movements of celestial bodies for the purpose of enabling navigators to use celestial navigation to determine the position of their ship while at sea with reference to the sun, moon, planets, and 57 stars chosen for their ease of identification and wide spacing.
The measured angle between the celestial object and the horizon is directly related to the distance between the subpoint and the observer, and this measurement is used to define a circle on the surface of the earth, called a celestial line of position (LOP), the size and location of which can be determined using mathematical or graphical methods (Bowditch 1995). The LOP is significant because the celestial object would be observed at the same angle above the horizon from any point along its circumference at that instant. The observer is located anywhere on this LOP. Two LOPs, calculated from two celestial objects, can limit the observer’s position to only two points, each located where thes...
Table of contents
Cover
Half-Title
Title
Copyright
Contents
Preface
Acknowledgements
Author
Acronyms
Chapter 1 Overview of GNSS
Chapter 2 Functional Segments of GNSS
Chapter 3 Working Principle of GNSS
Chapter 4 GNSS Signals and Range Determination
Chapter 5 Errors and Accuracy Issues
Chapter 6 Positioning Methods
Chapter 7 GNSS Augmentations and Other Navigation Satellite Systems
Chapter 8 GNSS Receivers
Chapter 9 Geodesy
Chapter 10 Applications of GNSS
Chapter 11 Surveying with GNSS
Chapter 12 Mapping with GNSS
Glossary
References
Index
Frequently asked questions
Yes, you can cancel anytime from the Subscription tab in your account settings on the Perlego website. Your subscription will stay active until the end of your current billing period. Learn how to cancel your subscription
No, books cannot be downloaded as external files, such as PDFs, for use outside of Perlego. However, you can download books within the Perlego app for offline reading on mobile or tablet. Learn how to download books offline
Perlego offers two plans: Essential and Complete
Essential is ideal for learners and professionals who enjoy exploring a wide range of subjects. Access the Essential Library with 800,000+ trusted titles and best-sellers across business, personal growth, and the humanities. Includes unlimited reading time and Standard Read Aloud voice.
Complete: Perfect for advanced learners and researchers needing full, unrestricted access. Unlock 1.5M+ books across hundreds of subjects, including academic and specialized titles. The Complete Plan also includes advanced features like Premium Read Aloud and Research Assistant.
Both plans are available with monthly, semester, or annual billing cycles.
We are an online textbook subscription service, where you can get access to an entire online library for less than the price of a single book per month. With over 1.5 million books across 990+ topics, we’ve got you covered! Learn about our mission
Look out for the read-aloud symbol on your next book to see if you can listen to it. The read-aloud tool reads text aloud for you, highlighting the text as it is being read. You can pause it, speed it up and slow it down. Learn more about Read Aloud
Yes! You can use the Perlego app on both iOS and Android devices to read anytime, anywhere — even offline. Perfect for commutes or when you’re on the go. Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app
Yes, you can access Global Navigation Satellite Systems by Basudeb Bhatta in PDF and/or ePUB format, as well as other popular books in Technology & Engineering & Civil Engineering. We have over 1.5 million books available in our catalogue for you to explore.