EMBEDDED DIGITAL CONTROL WITH MICROCONTROLLERS
Explore a concise and practical introduction to implementation methods and the theory of digital control systems on microcontrollers
Embedded Digital Control with Microcontrollers delivers expert instruction in digital control system implementation techniques on the widely used ARM Cortex-M microcontroller. The accomplished authors present the included information in three phases. First, they describe how to implement prototype digital control systems via the Python programming language in order to help the reader better understand theoretical digital control concepts.
Second, the book offers readers direction on using the C programming language to implement digital control systems on actual microcontrollers. This will allow readers to solve real-life problems involving digital control, robotics, and mechatronics.
Finally, readers will learn how to merge the theoretical and practical issues discussed in the book by implementing digital control systems in real-life applications. Throughout the book, the application of digital control systems using the Python programming language ensures the reader can apply the theory contained within. Readers will also benefit from the inclusion of:
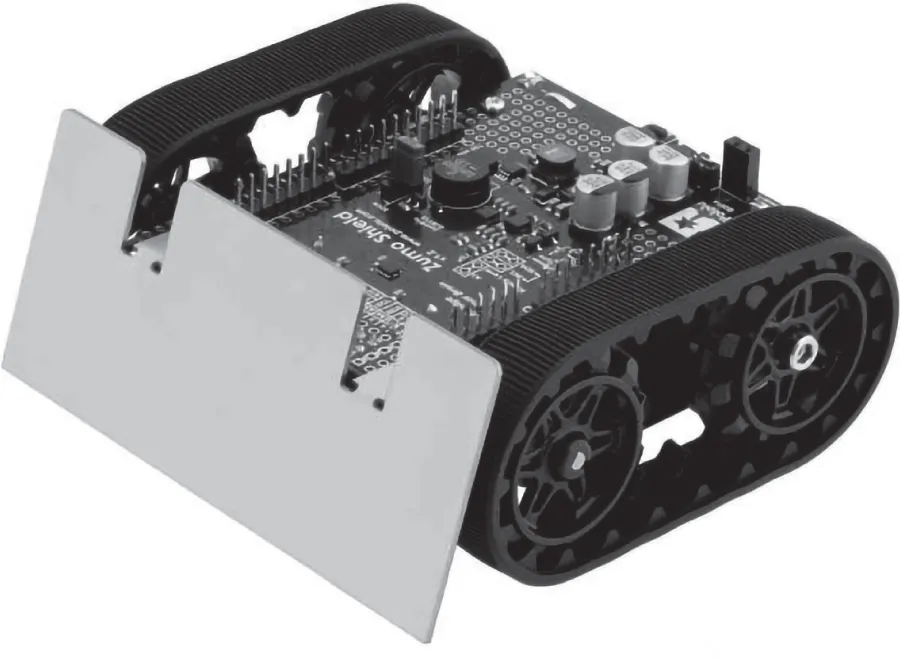
- A thorough introduction to the hardware used in the book, including STM32 Nucleo Development Boards and motor drive expansion boards
- An exploration of the software used in the book, including Python, MicroPython, and Mbed
- Practical discussions of digital control basics, including discrete-time signals, discrete-time systems, linear and time-invariant systems, and constant coefficient difference equations
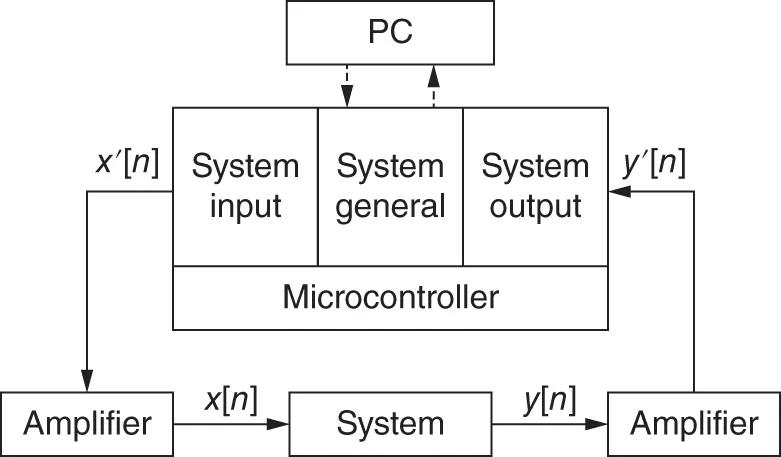
- An examination of how to represent a continuous-time system in digital form, including analog-to-digital conversion and digital-to-analog conversion
Perfect for undergraduate students in electrical engineering, Embedded Digital Control with Microcontrollers will also earn a place in the libraries of professional engineers and hobbyists working on digital control and robotics systems seeking a one-stop reference for digital control systems on microcontrollers.