This book presents recent advances in fault diagnosis and fault-tolerant control of dynamic processes. Its impetus derives from the need for an overview of the challenges of the fault diagnosis technique and sustainable control, especially for those demanding systems that require reliability, availability, maintainability, and safety to ensure efficient operations. Moreover, the need for a high degree of tolerance with respect to possible faults represents a further key point, primarily for complex systems, as modeling and control are inherently challenging, and maintenance is both expensive and safety-critical.
Diagnosis and Fault-tolerant Control 2 also presents and compares different fault diagnosis and fault-tolerant schemes, using well established, innovative strategies for modeling the behavior of the dynamic process under investigation. An updated treatise of diagnosis and fault-tolerant control is addressed with the use of essential and advanced methods including signal-based, model-based and data-driven techniques. Another key feature is the application of these methods for dealing with robustness and reliability.
eBook - ePub
Diagnosis and Fault-tolerant Control Volume 2
From Fault Diagnosis to Fault-tolerant Control
- English
- ePUB (mobile friendly)
- Available on iOS & Android
eBook - ePub
Diagnosis and Fault-tolerant Control Volume 2
From Fault Diagnosis to Fault-tolerant Control
About this book
Trusted by 375,005 students
Access to over 1.5 million titles for a fair monthly price.
Study more efficiently using our study tools.
Information
1
Nonlinear Methods for Fault Diagnosis
Silvio SIMANI1 and Paolo CASTALDI2
1Department of Engineering, University of Ferrara, Emilia-Romagna, Italy
2Department of Electrical, Electronic and Information Engineering, University of Bologna, Italy
1.1. Introduction
The model-based approach to fault diagnosis in technical processes has been receiving more and more attention over the last four decades, in the contexts of both research and real plant application.
Stemming from this activity, a large number of methods can be found in current literature based on the use of mathematical models of the technical process under diagnosis and on exploiting advanced control theory.
Model-based fault diagnosis methods usually use residuals that indicate changes between the process and the model. One general assumption is that the residuals are changed significantly so that detection is possible. This means that the residual size after the appearance of a fault is large and long enough to be detectable.
This chapter provides an overview on different fault diagnosis strategies, with particular attention to the fault detection and isolation (FDI) methods related to the dynamic processes and application examples considered in this book.
For all of the methods considered, it is essential that the technical process can be described by a mathematical model. As there is almost never an exact agreement between the model used to represent the process and the plant, the model-reality discrepancy is of primary interest.
Hence, the most important issue in model-based fault detection concerns the accuracy of the model describing the behavior of the monitored system. This issue has become a central research theme over recent years, as modeling uncertainty has risen from the impossibility of obtaining complete knowledge and understanding of the monitored process.
The main focus of this chapter is the mathematical description aspects of the process whose faults are to be detected and isolated. The chapter also studies the general structure of the controlled system, its possible fault locations and modes. Residual generation is then identified as an essential problem in model-based FDI, because, if it is not performed correctly, some fault information could be lost. The general framework for the residual generation is also recalled.
Residual generators based on different methods, such as input–output, state and output observers, parity relations and parameter estimations, are just special cases in this general framework. In the following, some commonly used residual generation and evaluation techniques are discussed and their mathematical formulation is presented.
Finally, the chapter presents and summarizes special features and problems regarding the different methods.
1.2. Fault diagnosis tasks
According to the definitions available in the related literature, model-based FDI can be defined as the detection, isolation and identification of faults in a system by using methods that can extract features from measured signals and use a priori information on the process available in terms of mathematical models. Faults are, thus, detected by setting fixed or variable thresholds on residual signals generated from the difference between actual measurements and their estimates obtained by using the process model.
A number of residuals can be designed, with each having sensitivity to individual faults occurring in different locations of the system. The analysis of each residual, once the threshold is exceeded, then leads to fault isolation.
Figure 1.1 shows the general model-based FDI system. It comprises two main stages of residual generation and residual evaluation. This structure was first suggested in Chow and Willsky (1980) and now is widely accepted by the fault diagnosis community.
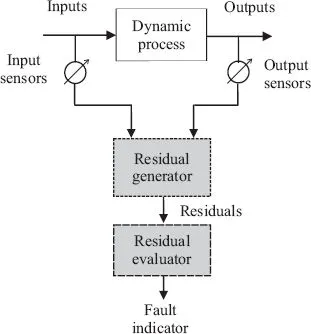
Figure 1.1. Fault diagnosis module
The blocks shown in Figure 1.1 perform the following tasks:
- 1) The residual generation module generates residual signals using the available inputs and outputs from the process under diagnosis. This residual (or fault symptom) should indicate that a fault has occurred. It should normally be zero or close to zero under no fault condition, and significantly different from zero when a fault occurs. This means that the residual is characteristically independent of process inputs and outputs in ideal conditions. Referring to Figure 1.1, this block is called the residual generator.
- 2) The residual evaluation module examines residuals for the likelihood of faults and a decision rule is then applied to determine if any faults have occurred. The residual evaluator block in Figure 1.1 may perform a simple threshold test (geometrical methods) on th...
Table of contents
- Cover
- Table of Contents
- Title Page
- Copyright
- 1 Nonlinear Methods for Fault Diagnosis
- 2 Linear Parameter Varying Methods
- 3 Fuzzy and Neural Network Approaches
- 4 Model Predictive Control Methods
- 5 Nonlinear Modeling for Fault-tolerant Control
- 6 Virtual Sensors and Actuators
- 7 Conclusions
- 8 Open Research Issues
- List of Authors
- Index
- Summary of Volume 1
- End User License Agreement
Frequently asked questions
Yes, you can cancel anytime from the Subscription tab in your account settings on the Perlego website. Your subscription will stay active until the end of your current billing period. Learn how to cancel your subscription
No, books cannot be downloaded as external files, such as PDFs, for use outside of Perlego. However, you can download books within the Perlego app for offline reading on mobile or tablet. Learn how to download books offline
Perlego offers two plans: Essential and Complete
- Essential is ideal for learners and professionals who enjoy exploring a wide range of subjects. Access the Essential Library with 800,000+ trusted titles and best-sellers across business, personal growth, and the humanities. Includes unlimited reading time and Standard Read Aloud voice.
- Complete: Perfect for advanced learners and researchers needing full, unrestricted access. Unlock 1.5M+ books across hundreds of subjects, including academic and specialized titles. The Complete Plan also includes advanced features like Premium Read Aloud and Research Assistant.
We are an online textbook subscription service, where you can get access to an entire online library for less than the price of a single book per month. With over 1.5 million books across 990+ topics, we’ve got you covered! Learn about our mission
Look out for the read-aloud symbol on your next book to see if you can listen to it. The read-aloud tool reads text aloud for you, highlighting the text as it is being read. You can pause it, speed it up and slow it down. Learn more about Read Aloud
Yes! You can use the Perlego app on both iOS and Android devices to read anytime, anywhere — even offline. Perfect for commutes or when you’re on the go.
Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app
Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app
Yes, you can access Diagnosis and Fault-tolerant Control Volume 2 by Vicenc Puig,Silvio Simani in PDF and/or ePUB format, as well as other popular books in Computer Science & Industrial Management. We have over 1.5 million books available in our catalogue for you to explore.