Many student private pilots don't realize at the start of their course that many hours of study are required on top of the in-class schedule. This book will help those trainee pilots without science backgrounds, or those that need a refresher, to brush up on the necessary theory. It covers subjects that will be encountered many times during the PPL course, such as principles of flight, aircraft general knowledge, flight performance and planning, meteorology, navigation and human factors. The content is organized around two main groups of information, namely core knowledge, concentrating more on the concepts; and a practical toolbox, dedicated to some techniques that will be required during the course. Aimed at those trainee pilots without science backgrounds or those that need a refresher on the necessary theory, this handy reference book is illustrated with 170 colour photographs10 black & white photographs.
Trusted by 375,005 students
Access to over 1 million titles for a fair monthly price.
This chapter will start with fundamental principles that are important to understand. There will be a little bit of memorization required but intuitive cues will be given so that these concepts can be related to everyday life and the physical reality around us.
Sir Isaac Newton, of the famous apple back in the 1680s, will be the guide for this chapter. We’ll stick to Newtonian physics, with all due respect to Albert Einstein, who would surely forgive us for simplifying some concepts such as gravity. At the speeds at which pilots move their airplanes, in the lower layers of the earth’s atmosphere, the postulations made by Sir Isaac hold steadfast and are certainly easier to accommodate.
Related Courses
Principles of Flight
Flight Performance
Mass and Balance
Human Factors
BODIES AND MASS – NEWTON’S FIRST LAW OF MOTION
The term ‘mass’ will be heard often during your PPL studies: the mass of the plane, the mass of the air (‘air masses’ are a different concept), the mass of fuel, the mass of passengers and so on. You will also hear about bodies but don’t worry, because there is nothing morbid in this: in physics, a body is simply a collection of matter, an object.
Mass is a property of all bodies and a simple description4 is as follows:
Mass is a measure of a body’s inertia and is commonly taken as a measure of the amount of matter it contains and causes it to have weight in a gravitational field.
It is intuitive enough and it helps introduce another important concept: inertia.
If you are sitting, you cannot move without making an effort. In fact, any body will resist moving if it is at rest – that is, not moving.
An object that is moving will tend to continue moving, as anyone with some ice skating experience will have discovered while heading for the side wall. This is inertia and it is so important that Newton postulated a law about it. In his honour, the scientists called it Newton’s first law of motion, a simplified version of which is:
An object either remains at rest or continues to move at a constant velocity unless acted upon by an external force.
This brings us to a third and vital element that deserves a title of its own: forces.
FORCES – NEWTON’S SECOND AND THIRD LAWS OF MOTION
A force is an action brought upon a body.
Fig. 4 The four forces that act on an airplane in flight.
An airplane does not fly by magic: it is moved around by forces exerted on it. Specifically, the plane flies above the ground thanks to the lift, which is produced essentially by the wings and which opposes the weight. The wings, in turn, are set in motion with the rest of the airplane by the thrust produced by the engine, which in turn fights the air resistance called drag.
Lift, weight, thrust and drag are the four forces that act on a flying airplane, as shown in Fig 4, a diagram that you will see often during the course (brushing up on your classics – this is a P-51 Mustang).
Intuitively, we know that a force must be exerted in order to displace an object: pushing a car, lifting a book, pumping iron at the gym… It is important to associate forces with movement and this will be formally done shortly, after a brief break to go through a bit of basic maths.
Vectors and Scalars
Our intuition about forces also tells us that:
A force has magnitude: how hard one pushes or pulls
A force has direction: where the object is being pushed or pulled – ahead, above, sideways and so on
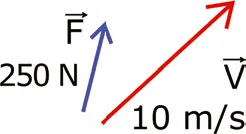
Fig 5 Representation of two different vectors.
Mathematicians designate a vector as an entity that is described by a magnitude and a direction. They are graphically represented by an arrow with a length proportional to their magnitude showing the direction of the action (Fig 5). The name of the vector is represented by a letter with a small arrow over it (often omitted, as it will be in the course of this book when it’s obvious we are dealing with a vector). Conversely, entities such as mass or time, which are not characterized by a particular direction – and are therefore sufficiently described by their magnitude alone – are scalar entities.
Example: Speed and Velocity
When an object moves from point A to point B, it covers a certain distance in a certain amount of time (let’s call it the rate of displacement) and in a specific direction. This rate of displacement is, at any given time, what we call speed and is measured in distance per unit of time (for example metres per second, miles per hour, knots). The direction is the direction of the movement, again at any given time (north, south, up, down and so on). The entity that describes this movement is called velocity and it has all the hallmarks of a vector: a magnitude (the speed) and a direction. And this is the difference between speed and velocity: speed is a scalar and velocity is a vector. They are quite often confused in common speech, helped no doubt by movies titles such as Terminal Velocity and Speed 2, but a difference exists that should formally be respected.
Working in Three Dimensions
One very important characteristic of vectors is that they can be ‘broken down’ into different components – in different directions – so that the actual effect that a force has on a body’s movement can be effectively determined.
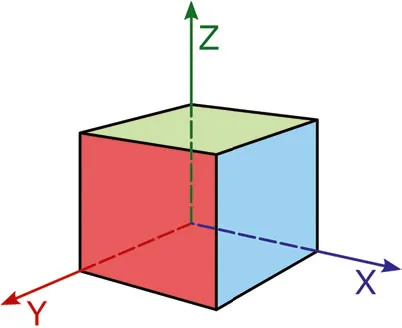
Fig 6 The axes used in three-dimensional co-ordinate systems.
Typically, in the three-dimensional world we live in, X, Y and Z are used as the three spatial co-ordinates (called rectangular co-ordinates). These coordinates are defined by three axes – X, Y and Z as shown in Fig 6 – and it’s along these axes that the dimensions of a room, for example, are measured: width is measured along X, depth along Y and height along Z.
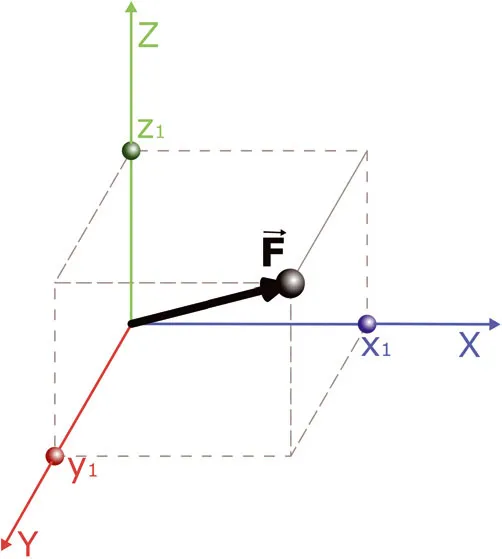
Fig 7 Finding the co-ordinates of a vector.
The same principle applies to a force. Picture a force
and place it at the origin of the three axes (where the three axes meet), as in Fig 7. The ‘co-ordinates’ x1, y1 and z1 of the vector tip (the point where the grey sphere is centred) can be obtained by projecting that position along each of the three different axes. The distance from the origin to the points indicated by the blue, red and green dots are the co-ordinates of that point along the different axes.
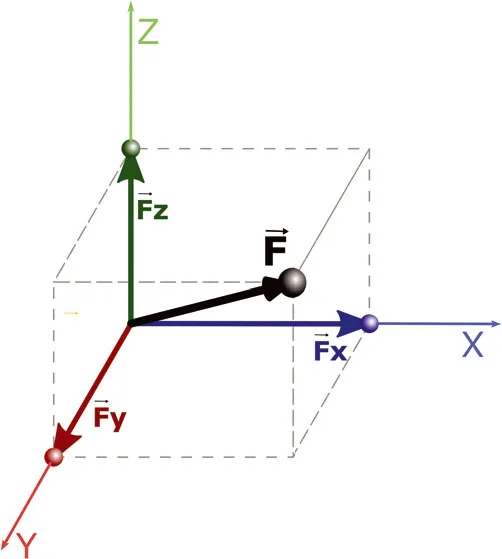
Fig 8 Decomposition of a vector.
Transposing this to vector lingo, these co-ordinates represent the magnitude of the vector’s projection along each axis. Three more vectors can be drawn from the origin to points x1, y1 and z1: the blue, the red and the green vectors in Fig 8. This manipulation is called decomposition of the vector and the three resulting vectors along each of the axes are called the vector’s components. These components have a very significant meaning, as they represent the action of the force along each of the three directions.
If you consider that force
is pushing an object in space, that object will move in all three dimensions: up/down along the Z axis, left/right along the ...
Table of contents
Cover Page
Title Page
Copyright Page
Dedication
Contents
Preface
Introduction
Core Knowledge
Practical Toolbox
Index
Frequently asked questions
Yes, you can cancel anytime from the Subscription tab in your account settings on the Perlego website. Your subscription will stay active until the end of your current billing period. Learn how to cancel your subscription
No, books cannot be downloaded as external files, such as PDFs, for use outside of Perlego. However, you can download books within the Perlego app for offline reading on mobile or tablet. Learn how to download books offline
Perlego offers two plans: Essential and Complete
Essential is ideal for learners and professionals who enjoy exploring a wide range of subjects. Access the Essential Library with 800,000+ trusted titles and best-sellers across business, personal growth, and the humanities. Includes unlimited reading time and Standard Read Aloud voice.
Complete: Perfect for advanced learners and researchers needing full, unrestricted access. Unlock 1.4M+ books across hundreds of subjects, including academic and specialized titles. The Complete Plan also includes advanced features like Premium Read Aloud and Research Assistant.
Both plans are available with monthly, semester, or annual billing cycles.
We are an online textbook subscription service, where you can get access to an entire online library for less than the price of a single book per month. With over 1 million books across 990+ topics, we’ve got you covered! Learn about our mission
Look out for the read-aloud symbol on your next book to see if you can listen to it. The read-aloud tool reads text aloud for you, highlighting the text as it is being read. You can pause it, speed it up and slow it down. Learn more about Read Aloud
Yes! You can use the Perlego app on both iOS and Android devices to read anytime, anywhere — even offline. Perfect for commutes or when you’re on the go. Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app
Yes, you can access Physics and Maths for the PPL by Luis Burnay in PDF and/or ePUB format, as well as other popular books in Technology & Engineering & Aviation. We have over one million books available in our catalogue for you to explore.