eBook - ePub
Dynamic Systems Modelling and Optimal Control
Applications in Management Science
- English
- ePUB (mobile friendly)
- Available on iOS & Android
eBook - ePub
Dynamic Systems Modelling and Optimal Control
Applications in Management Science
About this book
Dynamic Systems Modelling and Optimal Control explores the applications of oil field development, energy system modelling, resource modelling, time varying control of dynamic system of national economy, and investment planning.
Trusted by 375,005 students
Access to over 1 million titles for a fair monthly price.
Study more efficiently using our study tools.
Information
1
Optimal Control Problem
Solution of a continuous-time optimal control problem
Pontryagin (1962) and his associates developed the maximum principle for solving continuous-time control problems. Basically, the maximum (or minimum) principle provides a set of local necessary conditions for optimality. According to this method, variables analogous to the Lagrange multipliers should be introduced. These variables, usually denoted by p, are often called the co-state or adjoint-system variables. A scalar-value function H, which generally is a function of x,p,u (state, co-state, control vector) and t, named Hamiltonian function of the problem, is also considered. An economic model can be presented as:

or

where


The trajectory of a non-stable system exhibits explosive oscillations. The general solution of the system presented in (1.1) has the form:

where x(t0) is fixed.
We can rewrite it as (Pontryagin, 1962):

where matrix Φ(t) and the vector r(t) can be computed given t and u(t). Φ(t) is known as the state transition equation or fundamental matrix of solutions.
In an optimal control problem, nominal state and control trajectories, denoted by ẍ(t) and ü(t), are specified, and the performance function to be minimized is:
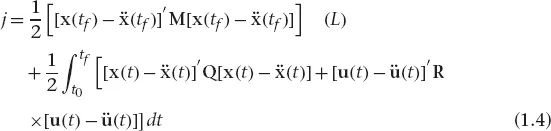
where t0, tf denote the initial and final lime.
Symmetric weighting matrices M,Q and R, are defined as En × En, En × En and Em × Em respectively. Matrix R is assumed to be positive definite whilst the other two may be positive semi-definite.
The control problem is as follows
Minimize the cost function (1.4), with the constraints:

where, x(t0) and t are fixed.
To solve ...
Table of contents
- Cover
- HalfTitle
- Title
- Copyright
- Dedication
- Contents
- List of Figures
- List of Tables
- Preface
- 1 Optimal Control Problem
- 2 Optimal Planning with Exhaustible Resource
- 3 Management of Oil Field Development
- 4 Energy System Modelling
- 5 Control System Modelling for Investment Planning
- 6 National Economic Management with Stochastic Optimal Control: Simulations over History
- 7 Anticipations and Time-Varying Modelling in Adaptive Control System
- 8 Dynamics of Information and Resource Management
- Conclusion
- References
- Index
Frequently asked questions
Yes, you can cancel anytime from the Subscription tab in your account settings on the Perlego website. Your subscription will stay active until the end of your current billing period. Learn how to cancel your subscription
No, books cannot be downloaded as external files, such as PDFs, for use outside of Perlego. However, you can download books within the Perlego app for offline reading on mobile or tablet. Learn how to download books offline
Perlego offers two plans: Essential and Complete
- Essential is ideal for learners and professionals who enjoy exploring a wide range of subjects. Access the Essential Library with 800,000+ trusted titles and best-sellers across business, personal growth, and the humanities. Includes unlimited reading time and Standard Read Aloud voice.
- Complete: Perfect for advanced learners and researchers needing full, unrestricted access. Unlock 1.4M+ books across hundreds of subjects, including academic and specialized titles. The Complete Plan also includes advanced features like Premium Read Aloud and Research Assistant.
We are an online textbook subscription service, where you can get access to an entire online library for less than the price of a single book per month. With over 1 million books across 990+ topics, we’ve got you covered! Learn about our mission
Look out for the read-aloud symbol on your next book to see if you can listen to it. The read-aloud tool reads text aloud for you, highlighting the text as it is being read. You can pause it, speed it up and slow it down. Learn more about Read Aloud
Yes! You can use the Perlego app on both iOS and Android devices to read anytime, anywhere — even offline. Perfect for commutes or when you’re on the go.
Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app
Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app
Yes, you can access Dynamic Systems Modelling and Optimal Control by Victoria Miroshnik,Dipak Basu in PDF and/or ePUB format, as well as other popular books in Business & Business Mathematics. We have over one million books available in our catalogue for you to explore.