![]()
Chapter 1
Wind Energy Harvesting for Recharging Wireless Sensor Nodes: Brief Review and A Case Study
Yen Kheng Tan
Dibin Zhu and Steve Beeby
Electronics and Computer Science, University of Southampton,
United Kingdom
1. Introduction
With the recent advances in wireless communication technologies, sensors and actuators, and highly integrated microelectronics technologies, wireless sensor networks (WSNs) have gained worldwide attention by facilitating the monitoring and control of physical environments from remote locations, which can be difficult or dangerous to reach. WSNs represent a significant improvement over wired sensor networks with the elimination of the hardwired communication cables and associated installation and maintenance costs. The possible uses of WSNs for real-time information in all aspects of engineering systems are virtually endless, from intelligent building control to health-care systems, environmental control systems, and more. As electronic hardware circuitries become cheaper and smaller, more and more of these WSN applications are likely to emerge, particularly as these miniaturized wireless sensor nodes offer the opportunity for electronic systems to be embedded unobtrusively into everyday objects to attain a “deploy-and-forget” scenario.1
The major hindrances of the “deploy-and-forget” nature of WSNs are their limited energy capacity and the unpredictable lifetime performance of the battery. To overcome these problems, energy harvesting (EH)/scavenging, which harvests/scavenges energy from a variety of ambient energy sources and converts it into electrical energy to recharge the batteries, has emerged as a promising technology.1 With the significant advancement in microelectronics, the energy and therefore the power requirement for sensor nodes continues to decrease from a few milliwatts to a few tens of microwatts. This paves the way for a paradigm shift from the battery-operated conventional WSN, which solely relies on batteries, toward a truly self-autonomous and sustainable energy-harvesting wireless sensor network (EH-WSN). EH for powering wireless sensor nodes from ambient environment has drawn more and more attention over the last decade. Some possible energy sources from ambient environment include photonic energy,2 thermal energy,3 vibration energy,4 and flow energy.5 For EH from the kinetic energy in flow of air (wind), existing methods include using turbines, harvesting energy from flow-induced vibration (FIV), and using Helmholtz resonators would be reviewed and elaborated with a case study.
2. Wind Energy Harvesting from Wind Turbines
2.1. Description of technique
A wind turbine is a device that converts wind energy into rotational mechanical energy. Electrical energy can be generated by employing transduction mechanism to exploit the mechanical energy. The first wind turbines for electricity generation had already been developed at the beginning of the 20th century and the technology improved incrementally since the early 1970s.
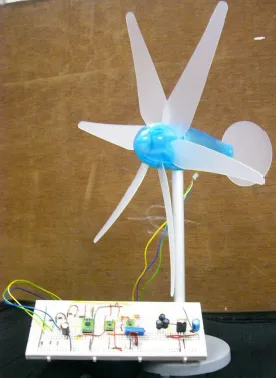
Wind turbines are classified into vertical and horizontal axis types. Horizontal axis wind turbines (HAWTs) have a horizontal shaft and blades (or sails) revolving in the vertical plane. The horizontal axis refers to the rotating shaft of the wind turbine, not the plane in which the blades rotate. The horizontal axis machine has its main shaft parallel to the ground. Figure 1 shows an example of the horizontal axis wind power generator.
Wind energy conversion systems can be divided into those which depend on aerodynamic drag and those which depend on aerodynamic lift. The early vertical axis windmills utilized the drag principle. Drag devices, however, have a very low maximum energy conversion efficiency of around 0.16.
The simplest vertical axis machine is a Savonious rotor, which consists of two oil-drum halves facing in opposite directions. They are extremely easy to construct and work by drag which makes them quite inefficient; a Savonious can manage to utilize only 10% of the wind energy. A more efficient vertical axis machine is the Darrieus rotor, which operates by lift forces. Its two blades are aerofoil in shape and so are more efficient than the Savonious, and the rotor can turn quite fast. The only problem with the Darrieus is that it is not self-starting and needs a small drag rotor on top. The advantage of all vertical axis machines is that they can turn on wind coming from any direction. So, unlike the horizontal axis machines, they do not have to face up or downwind in order to rotate. Since the end of the 1980s, however, the research and development of vertical axis wind turbines (VAWTs) has almost stopped worldwide. The horizontal axis approach currently dominates wind turbine applications.
Fig. 1. A miniature wind power generator.
Modern wind turbines are predominantly based on the aerodynamic lift. Lift devices use aerofoils to interact with the incoming wind. The force resulting from the aerofoils’ body intercepting the air does not only consist of a drag force component in direction of the flow but also of a force component that is perpendicular to the drag — the lift forces. The lift force is a multiple of the drag force and therefore the relevant driving power of the rotor. By definition, it is perpendicular to the direction of the airflow that is intercepted by the rotor blade, and via the leverage of the rotor, it causes the necessary driving torque. More details are illustrated in Ref. 1.
2.1.1. Savonius wind turbine
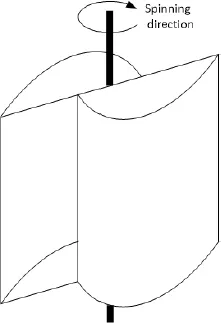
Savonius wind turbines are a type of VAWT, used for converting the power of the wind into torque on a rotating shaft. They were invented by the Finnish engineer Sigurd Johannes Savonius in 1922. Savonius turbines are a relatively simple form of turbine. Aerodynamically, they are drag-type devices, consisting of two or three scoops as shown in Fig. 2.
Looking down on the rotor from above, a two-scoop machine has an “S”-shaped cross section. Because of the curvature, the scoops experience less drag when moving against the wind than when moving with the wind. The differential drag causes the Savonius turbine to spin. Savonius turbines extract much less of the wind’s power than other similarly-sized lift-type turbines. The efficiency of a Savonius turbine is only around 10–20%.
Fig. 2. Savonius turbine.
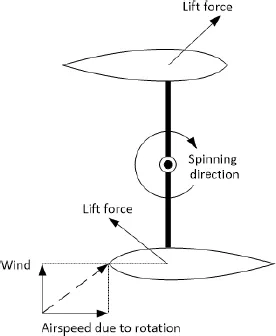
Fig. 3. Darrieus turbine.
2.1.2. Darrieus wind turbine
This type of turbine is another example of VAWT. The turbine consists of a number of aerofoils vertically mounted on a rotating shaft or framework as shown in Fig. 3. This type of wind turbine was patented by Georges Jean Marie Darrieus in 1931. They are sometimes referred to as “eggbeater” turbines, owing to their shape. The major drawback of a VAWT is the inefficiency of dragging each blade back through the wind on each half rotation. They do not self-start and need a manual push or some other, more elaborate starter mechanism. The efficiency is about the same as the Savonius type (sometimes slightly higher, depending on the exact nature of the design).
2.1.3. Maximum available power
The maximum mechanical power that can be extracted by a wind turbine is given by7:
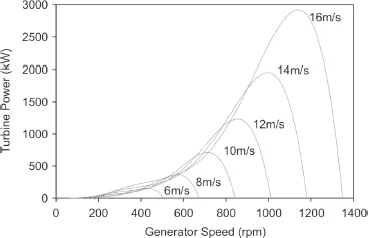
Fig. 4. An example of turbine output power (Source: Ref. 8).
where Pt is the power, ρ is the air density, r is the length of the turbine blade, and υ is the wind speed. cp is the power coefficient which is a function of tip speed to wind speed ratio, λ, and blade pitch angle, β. The power is proportional to square the length of the turbine blade and cube the wind speed, which means that maximum available power can reduce significantly if the turbine is scaled down or works at lower wind speeds.
In order to achieve maximum power, the tip speed to wind speed ratio should be kept at the optimal value for all wind speeds. Figure 4 shows an example of turbine output power versus the turbine rotational speed for different wind speeds.
2.1.4. Efficiency
The power efficiency of the rotor is the fraction of the total power available which the blades are able to convert. The theoretical maximum is 0.59. This is known as the Betz limit. However, many textbooks do not mention that Betz did not consider the impact of unavoidable swirl losses. For turbines with a high tip speed ratio, X>3, and optimum blade...