![]()
1
Introduction
We introduce our motive for writing this book on complexity and control with a popular “complexity myth,” which seems to be quite wide spread among chaos and complexity theory fashionistas:
Low-dimensional systems usually exhibit complex behaviours (which we know from May’s studies of the Logistic map), while high-dimensional systems usually exhibit simple behaviours (which we know from synchronisation studies of the Kuramoto model).
We admit that this naive view on complex (e.g., human) systems versus simple (e.g., physical) systems might seem compelling to various technocratic managers and politicians; indeed, the idea makes for appealing sound-bites. However, it is enough to see both in the equations and computer simulations of pendula of various degree1 – (i) a single pendulum, (ii) a double pendulum, and (iii) a triple pendulum – that this popular myth is plain nonsense. The only thing that we can learn from it is what every tyrant already knows: by using force as a strong means of control, it is possible to effectively synchronise even hundreds of millions of people, at least for a while.
More generally, the complexity theory, in its current stage of development, is still fascinated by emergence of wonderful behavioural qualities of high-dimensional self-organised systems. For example, the ‘science of fractal images’ is surely very nice, bridging the gap between science and visual arts, and creating illustrations that serve to inspire and fascinate. Yet we are left still wanting for something we contend is fundamentally important, namely a necessary capability for prediction and control2. This requirement was introduced into the world of physical sciences, at the end of the seventeenth century, by Sir Isaac Newton, and is the reason for the enduring usefulness of his theory, its empirical refutation notwithstanding. So, we can regard even the world of visually-appealing cellular automata, which are supposed to be able to efficiently model any kind of a complex system, as actually belonging to pre-Newtonian scientific era, because they are not capable of predicting and controlling individual agents’ behaviours.
We are arguing neither for nor against cellular automata and derived ostensibly soft engineering technologies3, which we acknowledge have produced many useful contributions to modern science and technology. In this book, we are proposing an alternative approach to behavioural complexity theory, intended to be especially rigorous, and designed for prediction and control of both crowds – or, indeed, large sets of agents of any kind – and of the individual agents comprising such groupings. We hope that this approach will also find its way to fields such as economics, where, in our view, the need for more sophisticated models such as this is especially pressing. In simple words, our goal is develop a rigorous framework for modelling very complex systems, potentially with thousands of individual agents, while not ignoring the psycho-physical individuality of each included agent. This novel, ‘hard maths’ approach to behavioural complexity theory can be called high-dimensional Kähler manifold complexity. It is a multi-fold mathematical approach, combining manifold geometry, loop topology, complex analysis and gauge theory, and has already been successfully tested in modern physics. From the signals-and-systems perspective, it is a nonlinear generalization of Kalman’s linear state-space control and filter theory; from dynamical perspective it is both Lagrangian and Hamiltonian; from geometrical perspective it is both Riemannian and symplectic; from physical perspective it is both classical and quantum; from ODE/PDE perspective it is both deterministic and stochastic. It is a uniquely promising internal framework for a wide variety of nonlinear systems of ODEs and PDEs, both real- and complex-valued. We submit that it is ready to become available as a new foundation of a rigorous behavioral complexity theory.
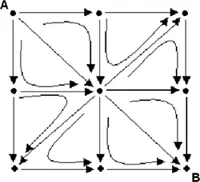
The other, external side, a ‘wrapper’, of this new approach to complexity is the commutative flow framework based on functional composition. Briefly, composing maps (or, functions, processes, signals, systems, transformations) is like following directed paths from one object to another (e.g., from set to set). In general, a diagram is commutative iff any two paths along arrows that start at the same point and finish at the same point yield the same ‘homomorphism’ via compositions along successive arrows. Commutativity of the whole diagram follows from commutativity of its triangular components (depicting a commutative flow, see Figure 1).
Fig. 1.1. A commutative flow (including all curved arrows) on a triangulated di-graph, defining the resulting path AB. Note that the commutativity of the whole diagram, and therefore the definition of the path AB, follows from the commutativity of its triangular components.
The result, we hope, is a rigorous theory of complex behaviour and control that can address some of the shortcomings of contemporary ideas in complexity. Our approach is founded on the principle of making definitive predictions, both by which we may act in the world and by which we may subject our models to the harshest responsible logical and empirical scrutiny we can muster. Indeed, it is our enduring hope that our approach will eventually be supplanted by one or more improved theories of greater explanatory and predictive power; such is the nature of the growth of knowledge.
![]()
2
Local Geometrical Machinery for Complexity and Control
In this Chapter, we present local geometrical machinery for studying complexity and control, consisting of dynamics on Kähler manifolds, which combine three geometrical structures – Riemannian, symplectic and complex (Hermitian) – in a mutually compatible way. In other words, every Kähler manifold is simultaneously Riemannian, symplectic and complex (Hermitian). It is well known that Riemannian manifolds represent the stage on which Lagrangian dynamics is set, symplectic manifolds represent the stage for Hamiltonian dynamics, and complex (Hermitian) varieties comprise the stage for quantum dynamics. Therefore, Kähler manifolds represent the richest dynamical stage available where Lagrangian, Hamiltonian, and quantum dynamics all dance together.
2.1 Introduction: Why Kähler Manifolds?
A set of attractor-following dynamics of n agents (for arbitrary n) in the complex plan...