![]()
Chapter 1
Review of Special Relativity
1.1 Introduction
The theory of Special Relativity (SR) was introduced by A. Einstein in 1905. It deals with the observations of inertial observers in the absence of gravity. The theory of General Relativity (GR) that includes gravitation (and thus acceleration) was published in 1915. For English translations see [Einstein (1905)]. The latter theory predicted the deflection of light near a massive body like the sun. When a British team led by A. S. Eddington confirmed this prediction near the end of the first world war, Einstein became world famous, even among people who had no particular interest in science.
In relativity an observation is the assignment of coordinates, xμ, μ = 0,1,2,3, for the time and space location of an event. Space is continuous and functions of the coordinates can be differentiated. Upon partial differentiation with respect to one of the coordinates, the others are held constant. This insures that the coordinates are independent,
As will be seen,
is the Kronecker delta tensor. Note the shorthand notation for the partial derivative by use of a comma. Such a shorthand will keep some of the formulas of GR, with many partial derivatives, to a reasonable length. In rectangular coordinates,
xμ = (
t, x, y, z). If curvilinear coordinates are used, the coordinates,
xμ′, are different and a rotation carries you from one set of coordinates to the other. In cylindrical coordinates,
xμ′ = (
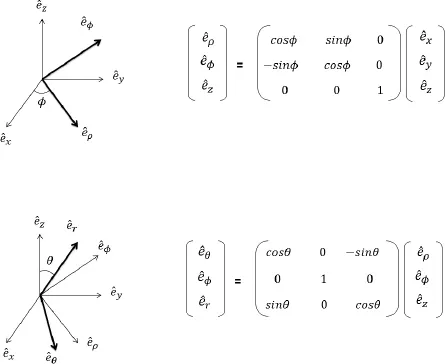
t, ρ, ϕ, z), because as illustrated in
Fig. 1.1, the rotation changes the direction indicating unit vectors,
êx, êy →
êρ, êϕ. Similarly for spherical coordinates,
xμ′ = (
t, θ, ϕ, r), since,
êρ, êz →
êθ, êr. Other texts employ an extra renaming and take
xμ′=0−3 =
t, r, θ, ϕ, but a rose by any name would smell sweet. Note, the spatial components of vectors change in the same way as the unit vectors.
Fig. 1.1 Rotation relations for changing unit vectors from one coordinate system to another.
The time of the event is read on a clock at rest with respect to the observer, at the spatial coordinates of the event. In the inertial frames of SR, an observer may suppose that there are synchronized clocks at rest at every point in space. This would not be the case when gravity is taken into account because such clocks would run at different rates in a varying gravitational field. Simultaneous events for a given observer are those occuring at the same time on the clocks nearest them, that are at rest with respect to the observer.
Einstein developed SR from two postulates: (1) the laws of physics are the same for all inertial observers no matter their relative velocities; (2) all inertial observers measure the same speed of light in vacuum, c = 3 × 108m/s. It is the second postulate that causes conflict with the Newtonian concept of time flowing independent of everything else. This leads to the observation that events simultaneous to one observer may not be so to another. Also c becomes the limiting speed in order to preserve causality. In GR the the word “inertial” is removed and the principle of equivalence, no gravitational effect is experienced when freely falling in a uniform gravitational field, must be taken into account.
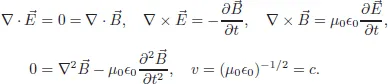
In hindsight it is easy to see where the postulates come from. Various inertial observers in relative motion do electromagnetic experiments in their own rest frames. They find that the equations of Maxwell for the electric, magnetic fields
explain the results. Further, in vacuum and using MKS units, each finds they lead to a wave equation with a unique velocity,
As c is so special in SR and GR, it is convenient to work in a system of units where velocities are dimensionless and, c = 1. Then time is expressed in meters like the other coordinates and acceleration is expressed in inverse meters:
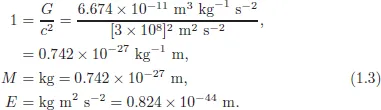
Similarly, in GR, Newton’s gravitational constant, G, is so special that it is convenient to also use, G = 1. This leads to the natural system of units. Here other mechanical quantities like mass, energy, momentum and angular momentum can be expressed in meters to the correct power:
Suppose a result is obtained in naturalized units for say, ħ = h/(2π) = 2.612 × 10−70m2, where h is Planck’s constant. One can calculate the value in MKS units by noting that in this system the units are those of angular momentum, kg m2s−1. Then, multiply the value in natural units by unity with a quantity that expressed in MKS units will give the desired units,
1.2 Lorentz Transform
Two observers O and O′ are considered. They use parallel axes and rectangular coordinates. Rotations, like those in Fig. 1.1, allow them to align their, z axes along the relative velocity. Thus, O uses, xμ, and says O′ is moving in the, z direction with speed, V (< 1), while O′ uses, xμ′, and says O is moving in the, −z direction with speed, V.
When their origins overlapped the clocks were synchronized, t = x0 = t′ = x0′ = 0. In this geometry, (x, y) = (x′, y′), or x1,2 = x1′,2′, because there is no relative motion in these directions. However, because, c = 1, for both observers, space and time are inter-connected and now termed spacetime. if O′ says that events led to changes in coordinates, dz′ = dx3′, dt′ = dx0′, the components of the displacement vector, drμ′, then O would calculate from the chain rule of differential calculus,
This is a linear transform because the vector components appear to the power unity. The coefficients, the partial derivatives, multiplying the vector components are relations between the coordinates of the different frames and are independent of the vectors. Thus such a transform must work, not only for the displacement vector, but for all vectors. If a set of four quantities, Vμ, do not transform as above, then they are not components of a vector.
For the Lorentz transform, the partial derivatives will soon be obtained. If the transfor...