Robot programming is the specification of the desired motions of the robot such that it may perform sequences of prestored motions or motions computed as functions of sensory input (Lozano‐Pérez, 1983).
In today’s competitive global economy, shortened life cycles and diversification of the products have pushed the manufacturing industry to adopt more flexible approaches. In the meanwhile, advances in automated flexible manufacturing have made robotic technology an intriguing prospect for small‐ and medium‐sized enterprises (SMEs). However, the complexity of robot programming remains one of the major barriers in adopting robotic technology for SMEs. Moreover, due to the strong competition in the global robot market, historically each of the main robot manufacturers has developed their own proprietary robot software, which further aggravates the matter. As a result, the cost of robotic tasks integration could be many folds of the cost of robot purchase. On the other hand, the applications of robots have gone well beyond the manufacturing to the domains such as household services, where a robot programmer’s intervention would be scarce or even impossible. Interaction with robots is increasingly becoming a part of humans’ daily activities. Therefore, there is an urgent need for new programming paradigms enabling novice users to program and interact with robots. Among the variety of robot programming approaches, programming by demonstration (PbD) holds a great potential to overcome complexities of many programming methods.
This introductory chapter reviews programming approaches and illustrates the position of PbD in the spectrum of robot programming techniques. The PbD architecture is explained next. The chapter continues with applications of PbD and concludes with an outline of the open research problems in PbD.
1.1 Robot Programming Methods
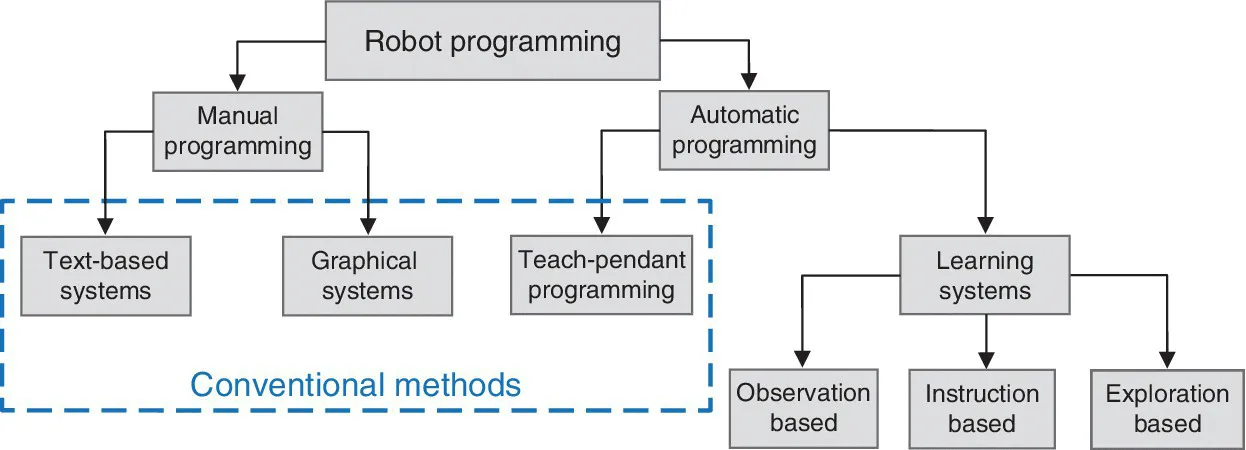
A categorization of the robot programming modes based on the taxonomy reported by Biggs and MacDonald (2003) is illustrated in Figure 1.1. The conventional methods for robot programming are classified into manual and automatic, both of which rely heavily on expensive programming expertise for encoding desired robot motions into executable programs.
Figure 1.1 Classification of robot programming methods.
(Data from Biggs and MacDonald (2003).)
The manual programming systems involve text‐based programming and graphical interfaces. In text‐based programming, a user develops a program code using either a controller‐specific programming language or extensions of a high‐level multipurpose language, for example, C++ or Java (Kanayama and Wu, 2000; Hopler and Otter, 2001; Thamma et al., 2004). In both cases, developing the program code is time‐consuming and tedious. It requires a robot programming expert and an equipped programming facility, and the outcomes rely on programmer’s abilities to successfully encode the required robot performance. Moreover, since robot manufacturers have developed proprietary programming languages, in industrial environments with robots from different manufacturers, programming robots would be even more expensive. The graphical programming systems employ graphs, flowcharts, or diagrams as a medium for creating a program code (Dai and Kampker, 2000; Bischoff et al., 2002). In these systems, low‐level robot actions are represented by blocks or icons in a graphical interface. The user creates programs by composing sequences of elementary operations through combination of the graphical units. A subclass of the graphical programming systems is the robotic simulators, which create a virtual model of the robot and the working environment, whereby the virtual robot is employed for emulating the motions of the actual robot (Rooks, 1997). Since the actual robot is not utilized during the program development phase, this programming method is referred to as off‐line programming (OLP).
The conventional automatic programming systems employ a teach‐pendant or a panel for guiding the robot links through a set of states to achieve desired goals. The robot’s joint positions recorded during the teaching phase are used to create a program code for task execution. Although programming by teach‐pendants or panel decreases the level of required expertise, when compared to the text‐based programming systems, it still requires trained operators with high technical skills. Other important limitations of the guided programming systems include the difficulties in programming tasks with high accuracy requirements, absence of means for tasks generalizations or for transfer of the generated programs to different robots, etc.
The stated limitations of the conventional programming methods inspired the emergence of a separate class of automatic programming systems, referred to as learning systems. The underlying idea of robot learning systems originates from the way we humans acquire new skills and knowledge. Biggs and MacDonald (2003) classified these systems based on the corresponding forms of learning and solving problems in cognitive psychology: exploration, instruction, and observation. In exploration‐based systems, a robot learns a task with gradually improving the performance by autonomous exploration. These systems are often based on reinforcement learning techniques, which optimize a function of the robot states and actions through assigning rewards for the undertaken actions (Rosenstein and Barto, 2004; Thomaz and Breazeal, 2006; Luger, 2008). Instructive systems utilize a sequence of high‐level instructions by a human operator for executing preprogrammed robot actions. Gesture‐based (Voyles and Khosla, 1999), language‐based (Lauria et al., 2002), and multimodal communication (McGuire et al., 2002) approaches have been implemented for programming robots using libraries of primitive robot actions. Observation‐based systems learn from observation of another agent while executing the task. The PbD paradigm is associated with the observation‐based learning systems (Billard et al., 2008).
1.2 Programming by Demonstration
Robot PbD is an important topic in robotics with roots in the way human beings ultimately expect to interact with a robotic system. Robot PbD refers to automatic programming of robots by demonstrating sample tasks and can be viewed as an intuitive way of transferring skill and tasks knowledge to a robot. The term is often used interchangeably with learning by demonstration (LbD) and learning from demonstration (LfD) (Argall et al., 2009; Konidaris et al., 2012). PbD has evolved as an interdisciplinary field of robotics, human–robot interaction (HRI), sensor fusion, machine learning, machine vision, haptics, and motor control. A few surveys of robot PbD are available in the literature (e.g., Argall et al., 2009). PbD can be perceived as a class of supervised learning problems because the robot learner is presented with a set of labeled training data, and it is required to infer an output function with the capability of generalizing the function to new contexts. In the taxonomy of programming approaches shown in Figure 1.1, PbD is a superior learning‐based approach. Compared to the exploration‐based learning systems (as an unsupervised learning problem), PbD systems reduce the search space for solutions to a particular task, by relying on the task demonstrations. The learning is also faster because the trial and errors associated with the reinforcement methods are eliminated.
In summary, the main purpose in PbD is to overcome the major obstacles for natural and intuitive way of programming robots, namely lack of programming skills and scarcity of task knowledge. In industrial settings, this translates to reduced time and cost of programming robots by eliminating the involvement of a robot programmer. In interactive robotic platforms, PbD systems can help to better understand the mechanisms of HRI, which is central to social robotics challenges. Moreover, PbD creates a collaborative environment in which humans and robots participate in a teaching/learning process. Hence, PbD can help in developing methods for robot control which integrate safe operation and awareness of the human presence in human–robot ...
Table of contents
Cover
Title Page
Table of Contents
Preface
List of Abbreviations
1 Introduction
2 Task Perception
3 Task Representation
4 Task Modeling
5 Task Planning
6 Task Execution
Index
End User License Agreement
Frequently asked questions
Yes, you can cancel anytime from the Subscription tab in your account settings on the Perlego website. Your subscription will stay active until the end of your current billing period. Learn how to cancel your subscription
No, books cannot be downloaded as external files, such as PDFs, for use outside of Perlego. However, you can download books within the Perlego app for offline reading on mobile or tablet. Learn how to download books offline
Perlego offers two plans: Essential and Complete
Essential is ideal for learners and professionals who enjoy exploring a wide range of subjects. Access the Essential Library with 800,000+ trusted titles and best-sellers across business, personal growth, and the humanities. Includes unlimited reading time and Standard Read Aloud voice.
Complete: Perfect for advanced learners and researchers needing full, unrestricted access. Unlock 1.4M+ books across hundreds of subjects, including academic and specialized titles. The Complete Plan also includes advanced features like Premium Read Aloud and Research Assistant.
Both plans are available with monthly, semester, or annual billing cycles.
We are an online textbook subscription service, where you can get access to an entire online library for less than the price of a single book per month. With over 1 million books across 990+ topics, we’ve got you covered! Learn about our mission
Look out for the read-aloud symbol on your next book to see if you can listen to it. The read-aloud tool reads text aloud for you, highlighting the text as it is being read. You can pause it, speed it up and slow it down. Learn more about Read Aloud
Yes! You can use the Perlego app on both iOS and Android devices to read anytime, anywhere — even offline. Perfect for commutes or when you’re on the go. Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app
Yes, you can access Robot Learning by Visual Observation by Aleksandar Vakanski,Farrokh Janabi-Sharifi in PDF and/or ePUB format, as well as other popular books in Technology & Engineering & Robotics. We have over one million books available in our catalogue for you to explore.