The development of mechatronic and multidomain technological systems requires the dynamic behavior to be simulated before detailed CAD geometry is available. This book presents the fundamental concepts of multiphysics modeling with lumped parameters.
The approach adopted in this book, based on examples, is to start from the physical concepts, move on to the models and their numerical implementation, and finish with their analysis. With this practical problem-solving approach, the reader will gain a deep understanding of multiphysics modeling of mechatronic or technological systems – mixing mechanical power transmissions, electrical circuits, heat transfer devices and electromechanical or fluid power actuators.
Most of the book's examples are made using Modelica platforms, but they can easily be implemented in other 0D/1D multidomain physical system simulation environments such as Amesim, Simulink/Simscape, VHDL-AMS and so on.
- English
- ePUB (mobile friendly)
- Available on iOS & Android
eBook - ePub
Multi-physics Modeling of Technological Systems
About this book
Trusted by 375,005 students
Access to over 1.5 million titles for a fair monthly price.
Study more efficiently using our study tools.
Information
1
Role of Simulation in the Design Cycle of Complex Technological Systems
Manufacturers of technological products are permanently engaged in innovation activities, particularly by integrating electronics and information technologies such as automation or computing. These systems are often characterized by a synergy of various physics domains, such as mechanics, electronics, hydraulics, thermodynamics and heat transfer. This unavoidably leads to highly complex systems, also known as mechatronic systems [UNM 08]. The design approach associated with these products involves distinct phases that will be described in the next section.
The use of adapted models and simulations in which physical prototypes (often costly and difficult to make or/and operate) are replaced by virtual prototypes (often far less costly, easier to implement and more flexible) makes it possible to reduce design costs and time. Nevertheless, each level of the design process is associated with various types of tools requiring different models and simulations. Up to this day, the realization of a single model representing the virtual product prototype is not realistic. In fact, there are nearly as many models as questions to be addressed, and some tools are better suited than others when it comes to tackling these questions.
This chapter presents the V design cycle of a complex product and describes the engineering tasks to be performed at each stage. For a better comprehension of the concepts introduced, this chapter presents an example of a mechatronics system – a personal transporter, as shown in Figure 1.1, often called Segway – which illustrates various types of models and the simulations associated with each level of the design cycle. This chapter closes with a description of the approaches taken in this book to provide an introduction to multi-physics modeling required by many engineering activities that have been described earlier.
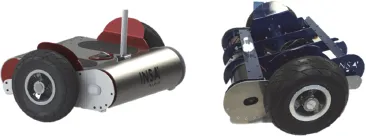
Figure 1.1. Digital model and prototype of a personal transporter for didactic purposes
1.1. Approach to the design of complex systems
Spanning multiple physics domains and involving increasingly sophisticated sub-systems, complex technological systems are calling into question the design methods that have until now entailed a “discipline”-based division. Indeed, an optimal system seldom corresponds to the sum of various optimized parts. A successful mechatronics application draws on an overall view of a system involving various previously separated disciplines and on the search for multi-technical solutions. The mechatronic design thus relies on an integrated design, based on multiple connections:
- – The multi-level design aspect of the prototype requirements, coupled with the necessity for multi-view (system, geometric, structural, behavioral, etc.) descriptions;
- – Multi-domain aspect (automation, mechanics, computing, electronics, etc.);
- – Multi-scale (geometric and temporal) refinement levels;
- – Finally, interactions between (multidisciplinary) teams.
The designer’s goal is to provide a product that has the highest possible degree of conformity with the needs stipulated by the client’s specifications and throughout its entire life cycle. To reach this goal, systems engineers use the design approach referred to as the V cycle [PEN 11], [VDI 04], shown in Figure 1.2. This cycle starts with a top-down approach specific to the engineering, design and development phase, followed by a bottom-up approach specific to the system’s integration, testing and validation. This V cycle covers the product design cycle from the clients’ specifications up to manufacturing. Given the environmental impact awareness, nowadays the cycle extends until the product’s end-of-life.
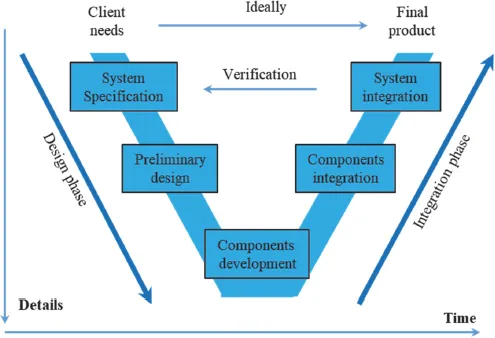
Figure 1.2. V-design cycle of complex mechatronic systems
1.1.1. Engineering activities in the design cycle
There are three levels in the top-down branch of the V cycle that represents the system’s engineering and design. The system is progressively defined at each level and the amount of details consequently increases:
- – “System specification” level. This phase justifies the creation of a system and defines what it should do to adequately satisfy the needs expressed by its potential users. This involves conducting a functional analysis of the need and implementing a Functional Specifications Document (FSD);
- – “Preliminary design” level. This phase enables the precise definition of what the system should be, the choice of various components and technical solutions, as well as the way in which they are interconnected. The system architect defines, at this level, one or several solution concepts. These concepts are evaluated against the functions and requirements defined in the previous phase, as well as against various technical, economic or other criteria. Only one concept is finally retained. The comparison of various potential solutions relies on the definition of their logical architecture (information chain) and structural architecture (power chain) and on the sizing of their parts. At the end of this phase, a file of specifications for the detailed design of various hardware and software components (parts) must be generated;
- – “Components development” or “geometric” level. This level involves the final choice of components. Professionals specializing in various fields (mechanics, electronics, heat transfer, etc.) size and optimize each part, to make sure that the specifications formulated in the previous stage are met. In-depth analysis of the components is also conducted under specific physical conditions (field of mechanical stresses, deformations, temperatures, fluxes, etc.). Digital prototypes are built and manufacturing plans are defined. Computer codes are implemented.
The bottom-up branch of the V cycle corresponds to integration tasks and enables the validation of the design works conducted in the top-down branch of the cycle. The various components designed in the lower part of the cycle are now assembled to form the prototype of the sub-systems (“components integration” level), which in turn are assembled to form the prototype of the system (“system integration” level). The latter is then tested against the requirements defined in the specifications document.
During the design cycle, the engineer can develop various versions depending on the system’s design readiness state. These intermediary solutions are verified through a recursive approach in which the cycle is completed by successive iterations until the final solution is obtained.
1.1.2. Modeling and simulation roles in the design cycle
In order to accelerate the design process, engineers use modeling and simulation at all stages of the V cycle. The aim is to replace the physical prototype of the system to be designed with a virtual prototype that enables the prediction of its performances before it is built. Most design cases require more than just one single model to address emerging issues. Different models are required to describe different design stages. Consequently, different computer-aided design (CAD) tools are adapted for modeling and calculating the corresponding models. The previously presented design stages are associated with simulation tools meeting the requirements at various abstraction levels. ...
Table of contents
- Cover
- Table of Contents
- Foreword
- 1 Role of Simulation in the Design Cycle of Complex Technological Systems
- 2 Fundamental Concepts of Lumped Parameter-Based Multi-Physics Modeling
- 3 Setting Up a Lumped Parameter Model
- 4 Numerical Simulation of Multi-Physics Systems
- 5 Dynamic Performance Analysis Tools
- 6 Mechanical and Electromechanical Power Transmissions
- 7 Power Transmission by Low-Compressibility Fluids
- 8 Heat Power Transmission
- 9. Thermal Power Conversion
- References
- Index
- End User License Agreement
Frequently asked questions
Yes, you can cancel anytime from the Subscription tab in your account settings on the Perlego website. Your subscription will stay active until the end of your current billing period. Learn how to cancel your subscription
No, books cannot be downloaded as external files, such as PDFs, for use outside of Perlego. However, you can download books within the Perlego app for offline reading on mobile or tablet. Learn how to download books offline
Perlego offers two plans: Essential and Complete
- Essential is ideal for learners and professionals who enjoy exploring a wide range of subjects. Access the Essential Library with 800,000+ trusted titles and best-sellers across business, personal growth, and the humanities. Includes unlimited reading time and Standard Read Aloud voice.
- Complete: Perfect for advanced learners and researchers needing full, unrestricted access. Unlock 1.5M+ books across hundreds of subjects, including academic and specialized titles. The Complete Plan also includes advanced features like Premium Read Aloud and Research Assistant.
We are an online textbook subscription service, where you can get access to an entire online library for less than the price of a single book per month. With over 1.5 million books across 990+ topics, we’ve got you covered! Learn about our mission
Look out for the read-aloud symbol on your next book to see if you can listen to it. The read-aloud tool reads text aloud for you, highlighting the text as it is being read. You can pause it, speed it up and slow it down. Learn more about Read Aloud
Yes! You can use the Perlego app on both iOS and Android devices to read anytime, anywhere — even offline. Perfect for commutes or when you’re on the go.
Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app
Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app
Yes, you can access Multi-physics Modeling of Technological Systems by Marc Budinger,Ion Hazyuk,Clément Coïc in PDF and/or ePUB format, as well as other popular books in Technology & Engineering & Electrical Engineering & Telecommunications. We have over 1.5 million books available in our catalogue for you to explore.