A unified view of the use of computer vision technology for different types of vehicles
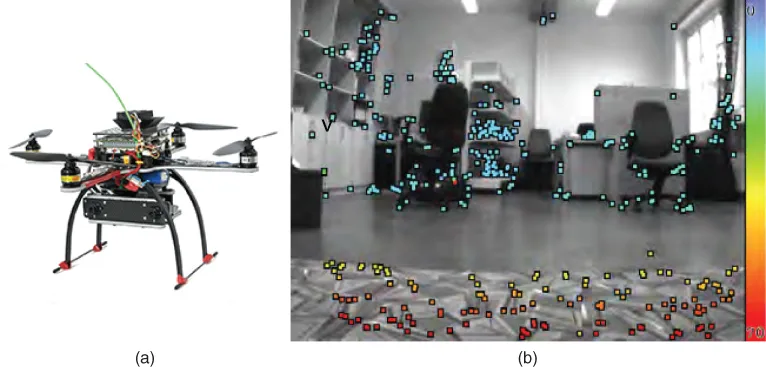
Computer Vision in Vehicle Technology focuses on computer vision as on-board technology, bringing together fields of research where computer vision is progressively penetrating: the automotive sector, unmanned aerial and underwater vehicles. It also serves as a reference for researchers of current developments and challenges in areas of the application of computer vision, involving vehicles such as advanced driver assistance (pedestrian detection, lane departure warning, traffic sign recognition), autonomous driving and robot navigation (with visual simultaneous localization and mapping) or unmanned aerial vehicles (obstacle avoidance, landscape classification and mapping, fire risk assessment).
The overall role of computer vision for the navigation of different vehicles, as well as technology to address on-board applications, is analysed.
Key features:
- Presents the latest advances in the field of computer vision and vehicle technologies in a highly informative and understandable way, including the basic mathematics for each problem.
- Provides a comprehensive summary of the state of the art computer vision techniques in vehicles from the navigation and the addressable applications points of view.
- Offers a detailed description of the open challenges and business opportunities for the immediate future in the field of vision based vehicle technologies.
This is essential reading for computer vision researchers, as well as engineers working in vehicle technologies, and students of computer vision.