The idea of autonomous systems that are able to make choices according to properties which allow them to experience, apprehend and assess their environment is becoming a reality. These systems are capable of auto-configuration and self-organization.
This book presents a model for the creation of autonomous systems based on a complex substratum, made up of multiple electronic components that deploy a variety of specific features.
This substratum consists of multi-agent systems which act continuously and autonomously to collect information from the environment which they then feed into the global system, allowing it to generate discerning and concrete representations of its surroundings.
These systems are able to construct a so-called artificial corporeity which allows them to have a sense of self, to then behave autonomously, in a way reminiscent of living organisms.
Trusted by 375,005 students
Access to over 1 million titles for a fair monthly price.
A system is designed to provide one or more services. It is made up of hardware, software and human resources, with the aim to satisfy a precise, well-defined need. Such systems abound in the history of science. Thanks to accumulating experience, technological progress and ever improving modeling approaches, methods to develop these are constantly gaining efficiency. The description of a system potentially involves various notions about its components, their aggregation and their interactions with each other and with the system’s environment.
A system usually consists of a set of interdependent entities whose functions are fully specified. The system is completely characterized according to an equational or functional approach, in an iterative top-down or bottom-up process. The process is top-down in an analytical approach whereby each part can be broken down into smaller subparts that are complete sub-systems themselves. Conversely, when the approach consists of building a system up from the basis of simpler sub-systems, the iterative process is called bottom-up. The system’s realization and potential evolution are predetermined in a strict, narrow field, and its functionalities can pertain to various applicative areas such as electricity, electronics, computer science, mechanics, etc.
Because of the advances being made in system design as well as in information and communication technologies, there is a tendency to design ever larger systems that involve an increasing number of strongly connected elements and which handle large volumes of data.
Systems can be categorized according to various typologies. Here, we will only focus on two classes: conventional systems and complex systems.
1.1.1. Conventional systems
Systems said to be individual or conventional have their inputs and outputs fully specified, in the sense that everything is already designed for them in the early stages of their conception. The vast majority of the systems we interact with belong to this class. Management applications, scientific computation programs and musical creation aids are all examples of conventional systems. The constitutive elements of such systems are defined and organized precisely to accomplish the tasks for which the system was formatted. They process inputs and produce actions or results that are the essential goals of the system, i.e. its “raison d’être”. Even if it continues to evolve while it is operational, as soon as it starts to depend on a project manager the system belongs to the class of conventional systems, for whom everything is delimited by a tight framework. An automatic teller machine (ATM) is a good example of such a system. Every single use-case must have been clearly defined, modeled and tested so that the machine is able to perform its duties reliably and respond accurately to its users (the customers and the bank). Operating in a degraded mode or in the event of unforeseen circumstances must have also been considered.
Conventional systems benefit from the development of computer networks, which expand their access to resources and their ability to interact. They also tend to become more complex, but they remain essentially conventional systems. Let us consider the example of service-oriented architectures (SOA) with, for instance, the recent development of cloud computing services. The great variety of services offered entails an intricate organization of many different subsystems within one global cloud. The architecture nevertheless remains a conventional system as long as the services offered can be deduced from the sum of the services provided by its subsystems. Integrating new systems in order to add new services will create a larger system that remains conventional because of its functional description. In such systems, the management of malfunctions is usually also built in.
1.1.2. Complex systems
Among the many types of systems that are detailed in the literature, complex systems are particularly often focused upon because of their unpredictable behavior. Complex systems usually apply to subjects in which a multidisciplinary approach is an essential part of any understanding: economy, neuroscience, insect sociology, etc.
Authors globally agree to define a complex system as a system composed of a large number of interacting entities and whose global behavior cannot be inferred from the behaviors of its parts. Hence, the concept of emergence: a complex system has an emergent behavior, which cannot be inferred from any of its constitutive systems. Size is not what qualifies a system as complex: if its parts have been designed and arranged so that they interact in a known or predictable way, then it is not a complex system. However, a non-complex system becomes complex as soon as it integrates a human being as one of its constituents.
Many behavioral features of complex systems are subject to intense research and scrutiny: self-organization, emergence, non-determinism, etc. To study complex systems, researchers usually resort to simulations, which enable them to grasp an idea, if incomplete, of the behavior of a system. In fact, complex systems exhibit some behavioral autonomy, a notion that will be detailed further on, when we relate it to the concept of proactivity.
Any information system that includes functional elements while taking human decisions and actions into account as well as handling multiple perspectives is a complex system in which the components are set in various levels of a multi-scale organization.
1.1.3. System of systems
The concept of system of systems (SoS) [JAM 08] was introduced into the research community without being characterized by a clear, stable definition. Several approaches to refine the concept can be found in the literature. It primarily implies that several systems operate together [ZEI 13]. Architectures that ultimately fall back in the conventional system class, where a centralized mechanism fully regulates the behavior, like in families of systems, are not considered to be SoS. Examples of SoS can be found in super-systems based on independent complex components that cooperate towards a common goal, or in large scale systems of distributed, competing systems.
The most common type of SoS [MAI 99] is that which is made of a number of systems that are all precisely specified and regulated so as to provide their own individual services but that do not necessarily report to the global system. To qualify as an SoS, the global system must also exhibit an emergent behavior, taking advantage of the activities of its subsystems to create its own. The number of subsystems can not only be large, but it can also change, as subsystems are able to quit or join the global system at any moment. This description highlights the absence of any predefined goal and underlines the essentially different mode of regulation of such an SoS. In other words, the general goal of an SoS need not be defined a priori.
The SoS can evolve constantly by integrating new systems, whether it be for financial reasons or because of technological breakthroughs. An SoS can thus gain or lose parts “live” [ABB 06]. This shows that an SoS cannot be engineered in a conventional manner, neither with a top-down nor with a bottom-up construction process.
This approach demands a specific architecture whose functioning implies some level of coordination/regulation as well as a “raison d’être”, manifesting itself by a drive towards one or several goals. This raises several issues about autonomy, the reasons for such an organization in autonomous systems, behavioral consistency, orientation of activity and regulation of such systems.
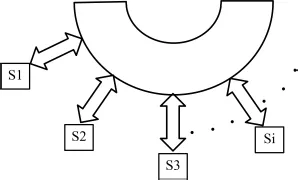
To approximate the behavior of an SoS, one can use distributed simulations. These simulations are similar to peer-to-peer simulations except that additional tools are required to apprehend emergent behaviors (see Figure 1.1).
Figure 1.1.Peer-to-peer organization around a network
1.2. Autonomous systems
The concept of an autonomous system (within the field of robotics) implies a system able to act by itself in order to perform the necessary steps towards the achievement of predefined goals, taking into account stimuli that, in robotics for example, come from sensors. In the literature, the perspectives on the notion of autonomy are diverse because the capacity to act by oneself can have various aspects and defining features, depending on whether it is applied to, for example, an automaton, a living being, or even a system able to learn in order to improve its activity.
Implied by the notion of autonomous system, which goes beyond that of non-autonomous system, the notion of intelligent regulation goes beyond the notion of regulation. Intelligent regulation calls upon algorithmic notions as well as upon linguistics and mathematics applied to systems and processes [SAR 85]. The regulation of hierarchical systems is often described by three level models that are widely documented in the literature. The following briefly reminds the reader of the basics of this modeling approach, which can be studied in more detail in the original paper by Saridis [SAR 85]. The three levels are:
– the organizational level;
– the coordination level;
– the executive level.
The first level seeks to mimic human functions, with a tendency towards analytical approaches. The following remarks can be formulated about this approach:
– the proposed model is hierarchical (top-down) and therefore describes a machine submitted to the diktat of the organizational level (the question remains of how information is communicated upwards);
– the approach relies heavily on computation and ignores any work on knowledge representation. Therefore, processing is done in a “closed world”, which seems prone to prevent any adaptation to multidisciplinary;
– the detailed definitions of each of these levels worsen this separation: for example, the two first levels do not even take into account notions such as organization and emergence;
– integrating two systems seems impossible in Saridis’s approach. Since there is absolutely no notion of proactivity in that approach, integrating a new proactive system is not plausible. Working on an a priori knowledge means that regulation is determined in advance, whereas a proactive element can’t be strictly regulated;
– that the notion of perspective, or point of view, is lacking is another significant point, as it is essential to our approach. In fact, one of our fundamental assumptions is that knowledge depends on perspective, which makes it relative. In our approach, knowledge is, therefore, subjective and we do not assume any absolute truth.
In this work, we propose a biology-inspired model of autonomous systems. It differs from the model described above. Our approach will show that we do not address the same issues as these addressed by strictly analytical approaches.
In order for the system to behave like an autonomous organism, its architecture must be made of elements that are considered as artificial organs. More importantly, the most elementary levels of the system must be made of informational components that also have some level, even if minimal, of autonomy, that are sensitive to their environm...
Table of contents
Cover
Table of Contents
Title
Copyright
Introduction
List of Algorithms
1 Systems and their Design
2 The Global Architecture of an Autonomous System
3 Designing a Multi-agent Autonomous System
4 Generation of Current Representation and Tendencies
5 The Notions of Point of View, Intent and Organizational Memory
6 Towards the Minimal Self of an Autonomous System
7 Global Autonomy of Distributed Autonomous Systems
Conclusion
Bibliography
Index
End User License Agreement
Frequently asked questions
Yes, you can cancel anytime from the Subscription tab in your account settings on the Perlego website. Your subscription will stay active until the end of your current billing period. Learn how to cancel your subscription
No, books cannot be downloaded as external files, such as PDFs, for use outside of Perlego. However, you can download books within the Perlego app for offline reading on mobile or tablet. Learn how to download books offline
Perlego offers two plans: Essential and Complete
Essential is ideal for learners and professionals who enjoy exploring a wide range of subjects. Access the Essential Library with 800,000+ trusted titles and best-sellers across business, personal growth, and the humanities. Includes unlimited reading time and Standard Read Aloud voice.
Complete: Perfect for advanced learners and researchers needing full, unrestricted access. Unlock 1.4M+ books across hundreds of subjects, including academic and specialized titles. The Complete Plan also includes advanced features like Premium Read Aloud and Research Assistant.
Both plans are available with monthly, semester, or annual billing cycles.
We are an online textbook subscription service, where you can get access to an entire online library for less than the price of a single book per month. With over 1 million books across 990+ topics, we’ve got you covered! Learn about our mission
Look out for the read-aloud symbol on your next book to see if you can listen to it. The read-aloud tool reads text aloud for you, highlighting the text as it is being read. You can pause it, speed it up and slow it down. Learn more about Read Aloud
Yes! You can use the Perlego app on both iOS and Android devices to read anytime, anywhere — even offline. Perfect for commutes or when you’re on the go. Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app
Yes, you can access New Autonomous Systems by Alain Cardon,Mhamed Itmi in PDF and/or ePUB format, as well as other popular books in Technologie et ingénierie & Robotique. We have over one million books available in our catalogue for you to explore.