![]()
1
Introduction to Sonar
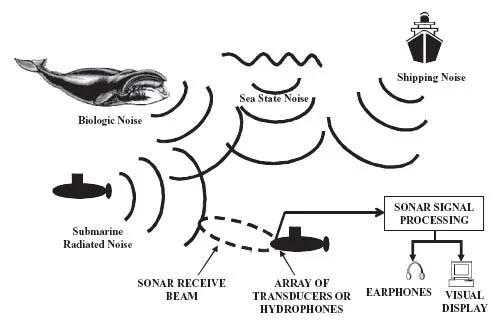
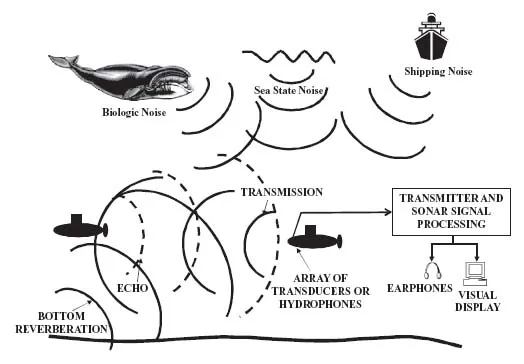
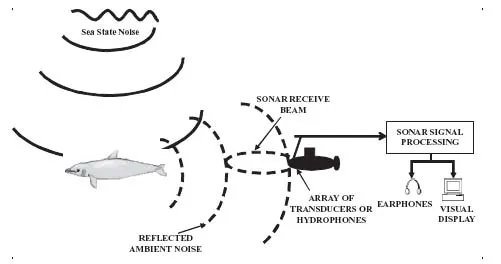
SONAR (SOund NAvigation and Ranging) systems have many similarities to radar and electro-optical systems. The operation of sonar is based on the propagation of waves between a target and a receiver. The two most common types of sonar systems are passive and active. In a passive sonar system, energy originates at a target and propagates to a receiver, analogous to passive infrared detection. In an active sonar system, waves propagate from a transmitter to a target and back to a receiver, analogous to pulse-echo radar. In addition to these two types, there is also daylight or ambient sonar, where the environment is the source of the sound, which bounces off or is blocked by the target, and the effects of which are observed by the receiver. This latter type of sonar is analogous to human sight.
Sonar differs fundamentally from radar and electro-optical systems because the energy observed by sonar is transferred by mechanical vibrations propagating in water, solids, gases, or plasma, as opposed to electromagnetic waves. Today, sonar refers not only to systems that detect and/or transmit sound, but to the science of sound technology as well.
In military applications, sonar systems are used for detection, classification, localization, and tracking of submarines, mines, or surface contacts, as well as for communication, navigation, and identification of obstructions or hazards (e.g., polar ice). In commercial applications, sonar is used in fish finders, medical imaging, material inspection, and seismic exploration.
Figures 1.1, 1.2, and 1.3 illustrate the basic passive, active, and daylight/ambient sonar systems.
1.1 Acoustic Waves
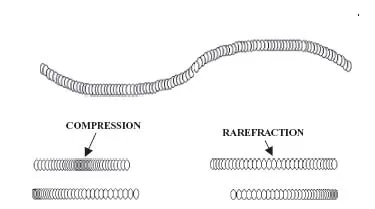
The term “acoustic” refers to sound waves in any medium. Acoustic waves come in two types: longitudinal or compression and transverse or shear. In fluids, only longitudinal or compression waves are supported because fluids lack shear strength. The easiest way to visualize these two types of waves is to consider a Slinky (see Figure 1.4). If the end or middle portion of a Slinky is moved side to side or up and down, a transverse or shear wave will move along it. This method displaces the material of the Slinky in a direction perpendicular to the direction of travel. As the material is moved off the axis, the spring force exerts a restoring force that pulls it back on axis. If several of the Slinky coils are compressed or stretched, then releasing them will propagate a longitudinal or compression wave along the Slinky. This method displaces the material of the Slinky along the direction of travel. Again, the restoring force will tend to push the material back into place. In this book, we will deal with transverse or shear waves only occasionally, so unless specifically stated, longitudinal or compression waves are assumed.
1.1.1 Compressions and Rarefactions
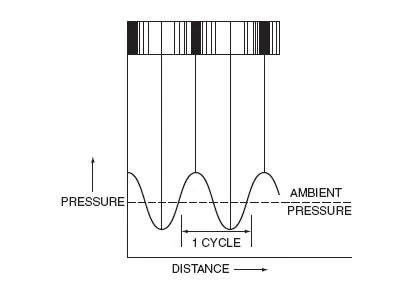
Longitudinal waves are composed of compressions, where the parts of the medium (coils of the Slinky) are closer together than normal, and rarefactions, where the parts of the medium are farther apart than normal.
The fundamental parameter of an acoustic wave is pressure. When water or air molecules are pushed or pulled apart, they exert a restoring force that resists the motion. The force will be felt locally as pressure or force per unit area. The amplitude of the wave will be the peak pressure reached in one cycle. The disturbance of the medium that propagates is the distance between molecules. Figure 1.5 illustrates the fundamentals of a pressure wave.
1.2 Speed of Propagation
For a nondispersive medium, one in which different wavelengths propagate at the same phase velocities (e.g., water), we would expect the same type of relationship between wavelength and frequency as with electromagnetic waves:
where
λ = wavelength, the distance between corresponding points (peak to peak or valley to valley)
f on a wave f = frequency, the number per unit time the wave performs a cycle
The speed of propagation for sound waves is much sl...