![]()
Chapter 1
Characteristics and State of the Art 1
1.1 Introduction
The history of medical robotics is recent with the first experiments in the field of neurosurgery dating from the 1980s. The first systems were directly adapted from industrial robotics. Since then, medical robotics have profited from the development of new materials, new sensors and actuators for robotics, along with a rise in the capacity for real-time calculation. Important factors relating to its progress have been the rapid evolution of medical imaging technology, as well as in the medical world a growing interest in robotics, which is today a major and practical form of improving medical practice. An obvious sign of this growth is the use of medical robotics in everyday clinical practice.
1.1.1. Characteristics of medical robotics
Medical robotics is principally distinguishable from classic robotics by the number of specific needs that we can list by considering three main requirements (from here on we will call these the 3 s):
– safety in the vicinity of the patient and their carers;
– sterility or sanitization;
– constraints of the surgical theater.
1.1.1.1. Safety
The issue of safety is of prime importance in medical robotics. It consists not only of the safety of the patient, but also the safety of the medical personnel who set-up and use the robotics system, as they often find themselves in close proximity to it. In effect, in medical robotics, the robotics system is in contact with the patient or the medical personnel which is quite unlike industrial robotics. In addition, in the health sector, every accident has an enormous negative effect for the practitioner as well as for the company marketing the device. Even if, in theory, a no-risk situation does not exist and there are always occupational hazards, it is clearly expected that a procedure assisted by a robotics system should be more safe and accurate than the same procedure carried out without assistance. Engineers here have a responsibility towards the doctor who will direct the robotics system. Even if the robot and its creators do not take the Hippocratic oath, we must at least keep in mind the first law of Asimov for robots. The use of the robotics system Robodoc (initially sold by the ISS company), which provides surgical orthopedic assistance, has thus had to stop in Europe following cases of badly fitted prosthesis reported in the German press. As a result, numerous rules have been enforced in the field of medical robotics regarding safety (see Chapter 5). Robotics systems must have:
– well defined, documented and precise protocols of use with adequate training of medical personnel;
– intuitive man-agent interfaces which are ergonomic and clear;
– automatic initialization procedures;
– procedures for termination and conversion to a conventional technique;
– a doctor in the loop if possible;
– intrinsically safe robotic structures;
– mechanical fuses if forces are high;
– redundant sensors;
– electric fuses;
– a limit on work space, velocity and force;
– procedures using software to test that all components are in good working order;
– procedures to ensure that every step of the medical procedure is executed correctly
– an extension to the medical procedure which does not put the patient’s health in jeopardy, etc.
The set up and the description of all these procedures and their components are necessary in order to obtain the stamp of approval from the EU or an “FDA approval”, which are required for sale on the market
1.1.1.2. Sterility
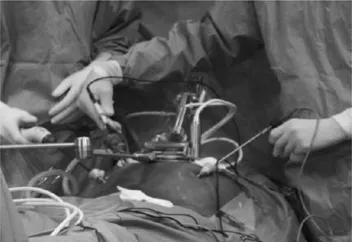
Another specific constraint encountered in medical robotics is sanitization for surgical procedures. Thus, the parts directly in contact with the patient or manipulated by the surgeon and the operators should be completely sterilized and the parts that could come into contact and cannot be sterilized should be covered in sterilized material (Figure 1.1). Amongst the more recent compact robots, some have been created in order to be totally sterilizable: this is the case for the LERViKY robot (Figure 1.2), which can be put into an autoclave.
The common constraints that are encountered in terms of sanitization for a surgical robot are the following:
– the parts in contact with the patient, the surgeon and the operators must be treated by the autoclave or they must be disposable and in sterile packaging;
– the non-disposable parts which cannot be treated by the autoclave should be covered with a sterile packaging following a very accurate procedure so that they will not be soiled;
– the personnel of the unit should be trained.
1.1.1.3. Surgical theater
Unlike in industrial robotics where the robotics system functions in a protective cage specially designed for this purpose, a medical robot has to adapt to the specific environment of the operating room. In effect, with the exception of robotized radiotherapy, very few hospital rooms exist which are specially designed to accommodate a robotic system. In addition to certification of medical equipment (EU stamp, FDA approval, etc.), constraints specific to the operation room are mainly dimensional, ergonomic and concerning availability, in particular it is preferable to:
– reduce obstructions as much as possible;
– clear the working area as much as possible (using a SCARA structure for example);
– be able to transport the robotics system and its controller, if possible using only one person;
– be able to easily take the robotics system in and out of the operating unit, unless a room is entirely dedicated to it (as in radiotherapy);
– define specific procedures for storing and maintaining the accessories;
– conduct pre-emptive maintenance;
– put in place effective management in case of failures;
– ensure electric and magnetic compatibility with the other pieces of equipment;
– avoid as much as possible the need to call additional specialized personnel, etc.
1.1.2. Potential advantages of using a robot in a medical procedure
Given the particular constraints of medical robotics in terms of authentication, safety, sterility and the operating room, it is obvious that the road from the laboratory to the robotics system used in surgical procedures is particularly long and difficult. As we will see throughout this chapter, success stories are relatively few. We must also ask ourselves, what should be defined as a success? There is scientific and technological success when a technological feat has been achieved. This is measured by the yardstick of scientific publications and certificates in the field of robotics. There is success for the surgeon who has accomplished something for the first time with a robot, but there is above all the surgical success when a robot improves the quality of treatment for a patient. Finally, there is commercial success when a company successfully puts a medical robotics system onto the market and makes a profit. The engineer or the robotic’s researcher, even if he is an expert in his field, cannot master all the skills needed to guarantee success at all levels. Nevertheless, before commencing a potentially intense, but often long and costly, research and development project, it is important to ask the following questions:
1. Is a medical quality assessment in the field of the project possible so as not to follow false leads out of ignorance of pre-existing good medical practices?
2. Does the laboratory prototype, depending on additional developments, have a reasonable chance of becoming a system which can be used on a patient, that is, could it be certified (EU, FDA) and does it respect the 3 s?
3. Will the robotics system objectively improve the procedure practiced by the doctor?
4. Is this improvement potentially significant for the patient or for the medical personnel?
Although is difficult to respond to the last question without carrying out comparative surgical trials between robotized procedures and manual procedures, it is possible to respond to the other queries at the beginning of a project or during this discussion. A positive response to the second question is necessary in order to be able to carry out clinical validations. A positive response to the third question assumes that we have identified practical advantages of using a robot in comparison to the manual procedure. The possible advantages of using a robot instead of a human are those that we have already encountered in other fields where robotics have been applied, and it is preferable that a few of these advantages be proven to be true, such as:
– velocity;
– accuracy;
– precision;
– automatically following a trajectory;
– capacity to execute position, velocity and force controls;
– compensation for excessive force;
– fusion of multimodal information in real-time;
– automatically record completed commands.
In the case of a tele-operated robotics system these include:
– scaling of movements and effort;
– increase in sensory feedback;
– performance at a distance or in a hostile environment;
– increase in the numbers of degrees of freedom (dof) and dexterity;
– automatic filtering-out of physiological movement and shaking.
The possibility of simulating a surgical command with a dedicated robotic interface can be added to the robot’s superior qualities. However, to be fair, we must also take into account the superior qualities of man over a robot, that is to say:
– the capacity to analyze a situation and make a decision;
– ...