1.1.1 What is an ROV?
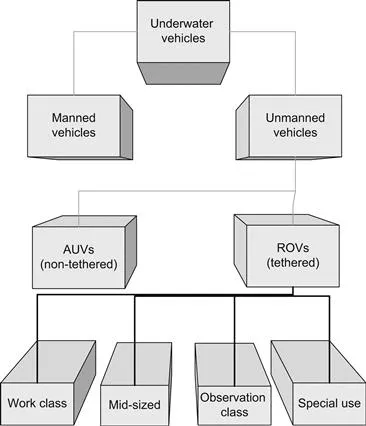
Currently, underwater vehicles fall into two basic categories (Figure 1.1): manned underwater vehicles and unmanned underwater vehicles (UUVs). The US Navy often uses the definition of UUV as synonymous with autonomous underwater vehicles (AUVs), although that definition is not a standard across the industry.
Figure 1.1 Underwater vehicles to ROVs.
According to the US Navy’s UUV Master Plan (2004 edition, section 1.3), an “unmanned undersea vehicle” is defined as a:
Self-propelled submersible whose operation is either fully autonomous (preprogrammed or real-time adaptive mission control) or under minimal supervisory control and is untethered except, possibly, for data links such as a fiber-optic cable.
The civilian moniker for an untethered underwater vehicle is the AUV, which is free from a tether and can run either a preprogrammed or logic-driven course. The difference between the AUV and the remotely operated vehicle (ROV) is the presence (or absence) of a direct hardwire (for communication and/or power) between the vehicle and the surface. However, AUVs can also be (figuratively) linked to the surface for direct communication through an acoustic modem, or (while on the surface) via an RF (radio frequency) and/or an optical link. But in this book, we are concerned with the surface-directed, hard-wired (tethered) ROV.
The ROV falls within a broad range of mobile robotic vehicles generally termed “remotely controlled mobile robots.” The motion of the vehicle can be via autonomous logic direction or remote operator control depending upon the vehicle’s capability and the operator’s degree of input. The power of the vehicle can be onboard (i.e., battery or engine powered), offboard (i.e., power delivered through conductors within the tether), or a hybrid of both (e.g., onboard battery powered with a power recharge transmitted remotely through the tether).
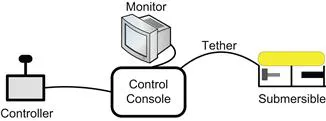
Simplistically, an ROV is a camera mounted in a waterproof enclosure, with thrusters for maneuvering, attached to a cable to the surface over which a video signal and telemetry are transmitted (Figure 1.2). Practically all of today’s vehicles use common industry standards for commercial off-the-shelf (COTS) components.
Figure 1.2 Basic ROV system components.
As the ROV goes from its simplest shallow water form toward the more complex deep water work vehicles, the required degree of sophistication of its operators as well as the depth of its support network climbs substantially in a similar fashion to that of aircraft or large surface vehicles.
The modern ROV is a mature technology with established standards of operator qualifications, safe operations, and a proven history of getting work done in the “dull, dirty and dangerous” work environments of the world’s waters.
The following sections will provide a better understanding of the scope of this definition. Subsequent chapters will provide in-depth discussions of the design of ROV systems along with operational considerations.
1.1.2 ROV size classifications
ROVs can be more specifically described as teleoperated free-swimming robotic unmanned (or “uninhabited” for the more modern term) underwater vehicles. These are used in a variety of applications from diver support to heavy marine subsea construction. The market is substantially segmented into four broad categories based upon vehicle size and capabilities:
1. Observation class ROVs (OCROV): These vehicles go from the smallest micro-ROVs to a vehicle weight of 200 pounds (100 kg). They (Figure 1.3) are generally smaller, DC-powered, inexpensive electrical vehicles used as either backup to divers or as a diver substitution for general shallow water inspection tasks. Vehicles in this classification are generally limited to depth ratings of less than 1000 ft (300 m) of seawater (fsw/msw) due to the weight of the power delivery components and one atmosphere pressure housings—which imposes limitations upon the vehicle size (i.e., neutral buoyancy must be maintained if the vehicle is to have the ability to swim). The vehicles within this class are typically hand launched and are free flown from the surface with hand tending of the tether. The older/antiquated term for vehicles of this classification is “low-cost ROVs.”
2. Mid-sized ROVs (MSROV): These vehicles weigh from 200 pounds (100 kg) to up to 2000 pounds (1000 kg). They (Figure 1.4) are generally a deeper-rated version of the OCROVs with sufficient AC power delivery components and pressure housings capable of achieving deeper depths over longer tether/umbilical lengths. These also are generally all-electric vehicles (powering prime movers (thrusters) and camera movement controls) with some hydraulic power for the operation of manipulators and small tooling package options. The vehicle electrical power is stepped down to a manageable voltage for operation of the various components and can be either AC or DC power. Vehicles in this classification are sometimes termed “light work class” vehicles to fully differentiate them from OCROVs. Due to the weight of these vehicles, a launch and recovery system (LARS) as well as a tether management system (TMS) is often needed.
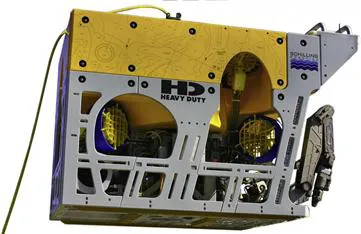
3. Work class ROVs (WCROV): Vehicles in this category are generally heavy electromechanical vehicles running on high-voltage (>3000 V) AC circuits from the surface to the vehicle (Figure 1.5). The power delivered to the vehicle generally is changed immediately to mechanical (hydraulic) power at the vehicle for locomotion as well as all manipulation and tooling functions.
4. Special-use vehicles: Vehicles not falling under the main categories of ROVs due to their non-swimming nature such as crawling underwater vehicles, towed vehicles, or structurally compliant vehicles (i.e., non-free-swimming). The special-use vehicle coverage is outside the purview of this text.
Figure 1.3 Examples of OCROVs (Note: shoes atop for scaling). (Courtesy SeaTrepid.)
Figure 1.4 Example of MSROV. (Courtesy Forum Energy Technologies.)
Figure 1.5 Example of WCROV. (Courtesy FMC Technologies.)
The general difference between the OCROV and the MSROV is the power transmission and depth rating. The general difference between the MSROV and the WCROV is the size of the hydraulic power pack and the horsepower rating for the operation of manipulators and tooling. Both the MSROV and the WCROV are deep-rated vehicles and both can be delivered to deep work sites. The WCROV, however, can perform heavier tasks than the MSROV is capable of achieving due to the added muscle of hydraulic actuation of its components (versus the electrical actuation of the MSROV). There are a few “electrical WCROVs” on the market, but the vast majority of the worldwide population of WCROVs is hydraulic due to the power requirement and the inherent reliability of hydraulic systems over their electric counterparts within the seawater environment. OCROVs are generally called “flying eyeballs” as their main job is to function as a shallow water video platform. The MSROV has additional deepwater capabilities along with fiber optic telemetry for full gigabit sensor throughput. The WCROV possesses all of the attributes of both the OCROV and the MSROV along with high-powered hydraulic manipulators and tooling capabilities (Table 1.1).
Table 1.1
ROV Classifications