
Mechanical Vibration
Fundamentals with Solved Examples
Ivana Kovacic, Dragi Radomirovic
- English
- ePUB (handyfreundlich)
- Über iOS und Android verfügbar
Mechanical Vibration
Fundamentals with Solved Examples
Ivana Kovacic, Dragi Radomirovic
Über dieses Buch
Mechanical oscillators in Lagrange's formalism – a thorough problem-solved approach
This book takes a logically organized, clear and thorough problem-solved approach at instructing the reader in the application of Lagrange's formalism to derive mathematical models for mechanical oscillatory systems, while laying a foundation for vibration engineering analyses and design.
Each chapter contains brief introductory theory portions, followed by a large number of fully solved examples. These problems, inherent in the design and analysis of mechanical systems and engineering structures, are characterised by a complexity and originality that is rarely found in textbooks.
Numerous pedagogical features, explanations and unique techniques that stem from the authors' extensive teaching and research experience are included in the text in order to aid the reader with comprehension and retention. The book is rich visually, including numerous original figures with high-standard sketches and illustrations of mechanisms.
Key features:
- Distinctive content including a large number of different and original oscillatory examples, ranging from simple to very complex ones.
- Contains many important and useful hints for treating mechanical oscillatory systems.
- Each chapter is enriched with an Outline and Objectives, Chapter Review and Helpful Hints.
Mechanical Vibration: Fundamentals with Solved Examples is essential reading for senior and graduate students studying vibration, university professors, and researchers in industry.
Häufig gestellte Fragen
Information
1
Preliminaries
Chapter Outline
Chapter Objectives
- To present preliminaries from Statics, Kinematics, Kinetics and Strength of Materials
- To focus only on the key concepts, facts and expressions of interest for the considerations presented in this book
- To provide help to readers to enable them to use this book on a stand‐alone basis
1.1 From Statics
1.1.1 Mechanical Systems and Equilibrium Equations
| Type | Mechanical model | Equilibrium equations |
| Concurrent forces | 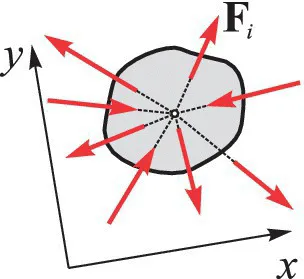 | 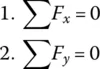 |
| Sum of the projections of all forces on two orthogonal axes is equal to zero. | ||
| Parallel forces and torques in the same plane |  |  |
| Sum of the projections of forces on the axis parallel to the direction of the forces is equal to zero. Sum of the moments about any point A on or off the body is equal to zero. | ||
| Arbitrary forces and torques in one plane | 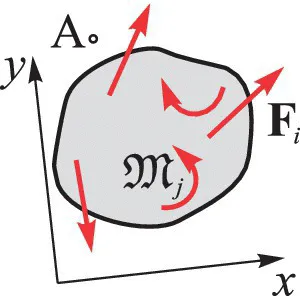 |  Sum of the projections of all forces on two orthogonal axes is equal to zero.Sum of the moments about any point A on or off the ... |